一种基于高效能主动转向式矢量装置的流线型水下航行器
- 国知局
- 2024-11-19 10:00:04
本发明涉及了一种流线型水下航行器,涉及水下智能装备领域,具体涉及一种基于高效能主动转向式矢量装置的流线型水下航行器。
背景技术:
1、随着海洋探索的不断深入及海洋资源的开发利用,自主式水下航行器auv(autonomous underwater vehicle)在多个领域,包括海洋科学考察、资源勘探以及环境监测等,正扮演着越来越重要的角色。为了提升自主式水下航行器auv在错综复杂的海洋环境中的工作效率并确保其安全性,增强其机动性已成为当前技术研发的重中之重。在这方面,矢量推进技术作为一种前沿的推进模式,赋予了自主式水下航行器auv更高的机动能力和灵活性。
2、然而,就当前水下智能装备的技术现状而言,大多数矢量推进系统仍采用被动转向机制,即通过推杆、舵机等外部装置来调整矢量推进的方向。但水下防水推杆和舵机的相关防水、密封等技术尚未成熟,影响了水下航行器的整体可靠性。此外,这些机械连接结构在海水的侵蚀下容易生锈、损坏,且容易受到海洋生物附着的影响,减少水下航行器使用寿命。而为了保持舱外的流线型设计,大量的机械结构不仅占据了较大的舱内空间,同时加大了内部布局的复杂性。
3、另一方面,现行的矢量推进装置通常采用单推进器式回转体设计。尽管这种设计在高速航行时表现出色,它依赖舵来实现姿态控制的方式却存在显著的局限性。具体来说,在低航速环境中,由于舵效降低和响应时间的增加,这种设计难以实现迅速而精确的机动,从而限制了水下航行器的操作灵活性和效率。此外,过分依赖舵进行姿态调整还可能导致不必要的能量损耗,进而影响水下航行器的续航能力和整体性能。
技术实现思路
1、为了解决背景技术中存在的问题,本发明所提供一种基于高效能主动转向式矢量装置的流线型水下航行器。本发明旨在解决现有技术方案中普遍存在的整体可靠性低、结构复杂、流线型设计受损以及机动性能不足等问题,通过引入被动和主动转向机制,实现水下航行器高效能矢量推进,确保其在复杂海洋环境下的作业能力和机动性能。
2、本发明采用的技术方案是:
3、一、一种基于高效能主动转向式矢量装置的流线型水下航行器:
4、流线型水下航行器包括航行器外壳、蓄电池组件、电控系统和主动转向式矢量装置,蓄电池组件、电控系统和主动转向式矢量装置沿流线型水下航行器的头部至尾部的方向依次安装在航行器外壳的内部舱室中,蓄电池组件和电控系统密封安装在航行器外壳的内部舱室中,航行器外壳的尾部开设有贯通孔并连通外部海水,主动转向式矢量装置位于贯通孔中且尾部位于航行器外壳外部的海水中;主动转向式矢量装置中包括用于自身被动转动的万向球头组件和主动转向的推进器组件,主动转向式矢量推进装置通过主动转向和实时姿态反馈,实时控制流线型水下航行器的状态;蓄电池组件、电控系统和推进器组件依次电连接。
5、所述的航行器外壳包括前段外壳、中段外壳和尾段外壳,前段外壳为子弹状的空心壳体且头部为圆弧状,中段外壳为圆柱状,尾段外壳为子弹状的空心壳体且尾部为圆弧状,尾段外壳的尾部中心开设有贯通孔;前段外壳和中段外壳之间通过双侧密封法兰同轴密封连接,中段外壳和尾段外壳通过单侧密封法兰同轴密封连接,单侧密封法兰朝向中段外壳的一侧进行密封,航行器外壳部分通过密封法兰以及沉头螺丝的紧密配合,实现了稳固而可靠的连接。前段外壳内部的电池舱和中段外壳内部的电控舱均为干舱且分别安装有蓄电池组件和电控系统,尾段外壳的矢量机构舱为湿舱且安装有主动转向式矢量装置。航行器外壳使用耐压金属材料,镶嵌锌块,并喷涂防腐蚀化学涂料,以实现水下千米级耐压、抗海水腐蚀和抗生物附着。尾段外壳上还设有用于方便安装拆卸的尾段舱盖。
6、所述的电控系统包括两块电机驱动器焊板、电机驱动器、光纤惯导、主控模块支撑板、主控模块、机载电脑、机载电脑固定挡板、机载电脑支架、分电板、两块系统焊板、系统支架和电力载波模块,电机驱动器通过两块电机驱动器焊板安装在中段外壳靠近前段外壳的一侧的内壁上,系统支架通过两块系统焊板安装在中段外壳靠近尾段外壳的一侧的内壁上,光纤惯导和分电板分别安装在系统支架的两侧,主控模块通过主控模块支撑板和若干支撑铜柱安装在系统支架上,机载电脑固定挡板通过机载电脑支架和若干支撑铜柱安装在系统支架上,机载电脑和电力载波模块安装在机载电脑固定挡板上;蓄电池组件分别电连接电机驱动器和分电板,光纤惯导、主控模块、机载电脑和电力载波模块均电连接分电板,电机驱动器、光纤惯导和机载电脑均电连接主控模块,机载电脑电连接电力载波模块,电力载波模块连接至岸基端的计算机设备。
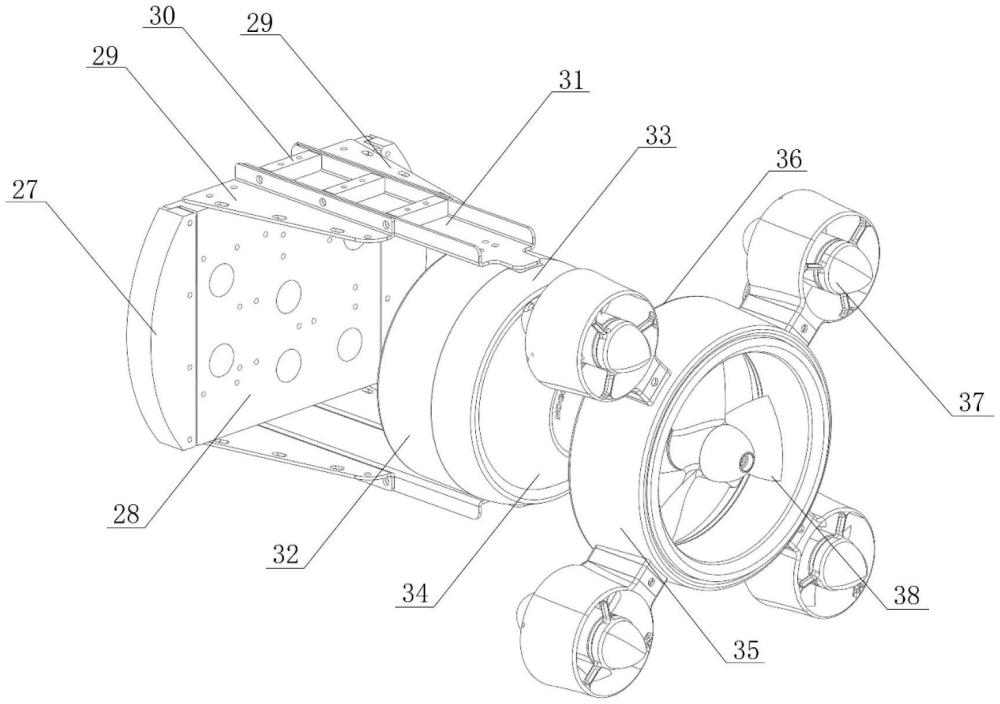
7、所述的主动转向式矢量装置还包括两块矢量机构焊板、矢量机构定位横梁和两个支撑件,矢量机构定位横梁通过两块矢量机构焊板安装在尾段外壳靠近中段外壳的一侧的内壁面,矢量机构定位横梁垂直于流线型水下航行器的中心轴,两个支撑件对称安装在矢量机构定位横梁的对称两侧边,支撑件包括两块连接钣金、一块支撑横梁和两块万向节定位钣金,支撑横梁的一端连接至矢量机构定位横梁的侧边,两块连接钣金安装在支撑横梁的对称两侧并连接至矢量机构定位横梁的侧边,支撑横梁的另一端连接至万向节定位钣金的一端,万向节定位钣金的另一端连接至万向球头组件的外侧面;万向球头组件远离矢量机构定位横梁的一侧套装在推进器组件的头部,推进器组件的尾部位于尾段外壳的外部海水中;推进器组件电连接电机驱动器和分电板。
8、高效能主动转向式矢量装置整体通过矢量机构焊板稳固地固定在尾段外壳内部。利用矢量机构定位横梁将连接钣金与万向节定位钣金水平安置,同时在万向节定位钣金中间增设支撑横梁,以强化连接结构的稳固性并提升承重能力。高效能主动转向式矢量装置特别适用于安装在流线型水下航行器的尾段动力舱内,以实现流线型水下航行器的高效能推进与灵活转向。
9、所述的万向球头组件包括万向球头轴承杯固定环、万向球头轴承杯锁定环和万向球头球形连接件,万向球头轴承杯固定环和万向球头轴承杯锁定环均为变径圆环状,万向球头轴承杯固定环和万向球头轴承杯锁定环直径相同的一侧圆形边相同轴连接,万向球头轴承杯固定环和万向球头轴承杯锁定环的直径均自自身的一侧圆形边向另一侧圆形边递减,万向球头球形连接件活动套装在万向球头轴承杯固定环和万向球头轴承杯锁定环中心,万向球头球形连接件为两端贯通的空心球状,万向球头球形连接件的贯通口朝向流线型水下航行器的尾部方向;万向球头轴承杯固定环的一侧圆形边上沿周向均匀间隔交替设有若干固定环定位孔和固定环通孔,万向球头轴承杯锁定环的一侧圆形边上沿周向均匀间隔交替设有若干锁定环凸台和锁定环螺纹孔,各个固定环定位孔和固定环通孔分别与各个锁定环凸台和锁定环螺纹孔相配合安装;万向球头轴承杯固定环的一侧圆形边上的对称两侧还设有两个连接块,万向球头轴承杯锁定环的一侧圆形边上的对称两侧开设有连接槽,连接时两个连接块嵌入连接槽中配合安装。支撑件的两个万向节定位钣金的另一端分别连接至万向球头轴承杯固定环的外周面的对称两侧;万向球头轴承杯固定环的两个连接块上分开开设有固定环主定位孔,且内周面上还开设有若干固定环辅助定位孔,万向球头轴承杯固定环通过固定环主定位孔和固定环辅助定位孔精准连接两个万向节定位钣金,确保稳固不晃动,为推进器提供坚实的力传递支点。
10、推进器组件包括圆周推进器支架、圆周推进器支架固定板、若干副推进器和主推进器,主推进器套装在圆周推进器支架中,圆周推进器支架固定板同轴安装在圆周推进器支架靠近万向球头组件的一侧圆周边上以避免主推进器脱出;各个副推进器间隔安装在圆周推进器支架的外周面上,主推进器的头部穿设过万向球头球形连接件的贯通口后同轴套装在万向球头球形连接件的内部;主推进器电连接电机驱动器,各个副推进器电连接分电板。
11、圆周推进器支架为设有若干副推进器固定孔和固定板连接螺纹孔的圆周推进器支架导流环,圆周推进器支架导流环的外周面上间隔设有若干安装各个副推进器的凸块,圆周推进器支架导流环的内周面上开设有若干用于安装凸块的副推进器固定孔,圆周推进器支架导流环靠近万向球头球形连接件的圆侧边上均匀间隔设有若干用于连接圆周推进器支架固定板的固定板连接螺纹孔,圆周推进器支架固定板的一侧圆周面上均匀间隔设有若干与各个固定板连接螺纹孔相配合安装的固定板连接通孔。
12、主推进器作为流线型水下航行器的主要动力源,可根据需求选择正桨或反桨配置,以实现强大的后向推力;具体实施时采用四个副推进器以x型对称方式环绕主推进器布置,配置有与主推进器相反方向的桨叶,以抵消航行过程中产生的反扭力矩,从而提升整体推进效率,采用x型设计的支架可支持两到四个推进器同时工作,进一步优化了反扭力矩的抵抗与推进效能;圆周推进器支架设计为圆台状,紧密贴合主推进器外壁,并在自身的外圆周面上伸出多个梯形凸台,以支撑各个副推进器并实现矢量段在多个维度上的角度调整;万向球头组件能够确保主推进器的稳固连接及方向调节的灵活性。各个凸台在圆周方向上的配置方式包括但不限于均匀分布与不均匀分布两种形式,且凸台的数量上亦不受限于特定值。此设计旨在提供多样化的结构配置选项,以适应不同应用场景下的性能需求与安装便利性。
13、所述的万向球头球形连接件的直径大于万向球头轴承杯固定环和万向球头轴承杯锁定环的另一侧圆形边的直径,万向球头轴承杯固定环和万向球头轴承杯锁定环的轴向平行于流线型水下航行器的中心轴;万向球头球形连接件的中心轴与各个副推进器和主推进器的中心轴平行。
14、所述的副推进器的数量大于等于二,当设置两个副推进器时,两个副推进器的呈九十度夹角布置,当设置多个副推进器时,各个副推进器均匀间隔布置;各个副推进器和主推进器的桨叶方向相反。
15、万向球头轴承杯固定环固定于机身尾段的窄口处外壳,起到支撑作用,而万向球头轴承杯锁定环则通过长螺栓与万向球头轴承杯固定环紧密相连,可简化安装过程,降低安装难度。万向球头球形连接件通过中轴柱形通孔与主推进器实现过盈配合连接,确保了连接的稳固性。此外,万向球头球形连接件上还设有八个呈阵列分布的m4螺纹孔,便于使用顶丝进行固定,增强主推进器的稳定性,进一步简化安装过程。
16、主推进器包括主推进器导流罩和主推进器主机,副推进器包括副推进器电调和副推进器导流罩,副推进器的副推进器电调安装在各自的一个凸台上;万向球头球形连接件的中心周向均匀间隔开设有若干主推进器锁定孔,主推进器头部的主推进器主机套装在万向球头球形连接件的贯通孔中并通过各个主推进器锁定孔配合安装。圆周推进器支架通过其圆周阵列凸台支撑各个副推进器,允许各个副推进器在两个维度上进行角度调整,从而实现航行器的矢量推进。同时,万向球头球形连接件确保主推进器与流线型水下航行器尾部的尾段外壳稳固连接,并允许主推进器进行灵活的转向运动。
17、所述的万向球头球形连接件的内壁面上还开设有惯性器件安装槽,惯性器件安装槽中安装有惯性器件,惯性器件电连接主控模块;惯性器件安装槽中设有用于安装惯性器件的惯性器件定位孔以及用于通讯的惯性器件通讯线出口,惯性器件通过惯性器件通讯线出口连接至主控模块。万向球头球形连接件的正下方的惯性器件安装槽可水平容纳并通过定位孔锁紧惯性器件,同时设计有通讯线出口,便于通讯线引出,以实时捕获矢量推进机构的三维姿态信息。
18、所述的尾段外壳内还设有gps天线和高精度压力传感器,gps天线的端部位于流线型水下航行器的外部海水中,gps天线电连接光纤惯导,压力传感器电连接主控模块。
19、尾段外壳内还设置有主控通讯接口、高精度压力传感器、gps天线、电力通讯接口、弱电供电开关等,以确保流线型水下航行器在复杂水域环境中的高效运行与精准控制。主动转向式矢量装置通过水密连接件为尾段用电器提供电能和控制信号,主控通讯接口、gps天线及电力通讯接口均使用微型水密接头,不仅实现舱体与外界环境的严密密封,有效防止水分侵入,还确保高速、稳定的数据与信号传输,保障树下航行器指令的即时响应与位置信息的精准获取。同时,压力传感器与弱电供电开关通过灌封工艺与硅胶密封圈结合,安装在尾段外壳的端面上,实现穿舱连接的同时,确保电气连接的可靠性与密封性。矢量推进装置上的五个推进器,均采用微型水密连接器与硫化工艺相结合的连接方式,提升推进器连接的稳固性与耐水性,实现流线型水下航行器内部的实时精准控制,为流线型水下航行器提供强大的动力支持与灵活的机动能力。
20、所述的流线型水下航行器还包括dvl(doppler velocity log)挂载支架和多普勒计程仪dvl传感器,多普勒计程仪dvl传感器通过dvl挂载支架安装在双侧密封法兰的外侧周面并位于航行器外壳外部的海水中;多普勒计程仪dvl传感器电连接光纤惯导。多普勒计程仪dvl传感器可以获取机体对底速度信息,并通过水密连接器连接电控舱内的光纤惯导,实现对于机体位置信息的精确定位。dvl挂载支架利用双侧密封法兰下方的预留螺丝孔进行安装固定,其水平端稳固地连接多普勒计程仪dvl传感器,确保数据传输的准确与稳定。
21、所述的蓄电池组件包括半圆状排布电池组、两个电池焊板和电池支架,电池支架通过两个电池焊板安装在前段外壳的内壁面上,电池组安装在电池支架上,电池组包括由若干蓄电池组成且位于前段外壳的内底部;电池组分别电连接电机驱动器和分电板。各个蓄电池的电芯排布设计为半圆状且位于内底部,可降低流线型水下航行器的重心,增加流线型水下航行器的恢复力矩。
22、蓄电池组件设计紧凑,垂直焊接的两块电池焊板作为电池组连接的稳固支点。电池组前端设有固定孔,可通过螺栓固定在电池支架的一侧。当电池组水平放置于前段外壳内部后,与电池焊板紧密锁合,并通过中间预留的通孔,引出电池供电线、通讯线及开关线,确保电力与信号的稳定传输。
23、二、一种基于高效能主动转向式矢量装置的流线型水下航行器的控制方法:
24、所述的流线型水下航行器通过其集成的传感器系统实时采集姿态与位置数据,流线型水下航行器在航行时,通过多普勒计程仪dvl传感器实时获取自身的对底速度信息,通过压力传感器和gps天线分别获取流线型水下航行器的深度和经纬度位置信息,流线型水下航行器的深度信息直接传输至主控模块中,流线型水下航行器的对底速度信息和经纬度位置信息均通过水密连接器和电控系统的光纤惯导传输至主控模块中,机载电脑根据流线型水下航行器的目标位置以及获取的对底速度信息、深度和经纬度位置信息进行实时精确的处理,快速生成将流线型水下航行器自当前位置移动至目标位置的控制策略信息并传输至主控模块中,控制策略信息中包括流线型水下航行器的移动路线和速度信息,机载电脑的处理结果经电力载波模块传输至岸基端进行实时通讯,电力载波模块通过电力载波通信技术以载波形式叠加于高于12v的较高电压之上,借助零浮力线缆实现远距离高效通讯;主控模块和机载电脑之间为双向通讯,即主控模块将其他传感器的相关数据收集、初步处理后传输到机载电脑,机载电脑将数据进行路径规划等需要高算力的操作后,将推力分布传回主控模块,并由主控模块控制主推进器和各副推进器实现相关操作。
25、万向球头球形连接件在不开启动力之前可以随海水被动转动,开启动力后就根据动力分配控制方向,流线型水下航行器的主动转向式矢量装置的万向球头组件的万向球头球形连接件作为支点支撑主推进器、各个副推进器等结构,其中圆周推进器支架设计为浮力材料,即低密度高强度的轻质复合材料,实现机体放置在水中时主推进器与机身水平,进而带动推进器组件转动,通过万向球头组件的惯性器件获取万向球头球形连接件的三维姿态信息,即获得推进器组件的三维姿态信息,然后传输至主控模块中,主控模块根据控制策略信息和推进器组件的三维姿态信息获得推进器组件的各个副推进器和主推进器的运行功率和转向角度,通过各个副推进器的动力分配,例如分配标号1、2、3、4,1为左上角的副推进器,顺时针依次标号,当1号动力更强时尾部矢量段会向该方向弯折,即1号推进器向机身靠近,进而实现机身受到矢量段向右下的力,进而通过电机驱动器控制各个副推进器和主推进器运行,直至流线型水下航行器到达目标位置。主控系统具备高度的灵活性与智能化,能够综合来自电源管理通讯模块、光纤惯导、压力传感器等多源信息,即时控制电机驱动器,精确调整主推进器和各个副推进器的功率分配及转向角度,通过调节各个推进器的功率分配,实现对矢量部分的姿态角度进行调节,进而控制流线型水下航行器位置和姿态的耦合控制,显著提高流线型水下航行器在水下航行时的机动能力和抗干扰能力,保障整体系统的稳定运行与高效性能,以实现姿态与位置的精准调控。
26、本发明的有益效果是:
27、1)本发明利用矢量推进技术,相较于其他传统的鱼雷型自主式水下航行器auv,通过引入先进的主动转向机制,显著提升了自主式水下航行器auv的性能,解决现有自主式水下航行器auv在矢量推进系统中面临的整体可靠性低、结构复杂、流线型设计受损及机动性能不足等问题,提高了自主式水下航行器auv的抗扰能力和姿态调节能力,使得自主式水下航行器auv能够实现水下悬停、原地自转、垂直平移运动、水平平移运动、俯仰角快速调节和紧急避障等各种复杂动作。
28、2)本发明以万向球头、主推进器和呈圆周阵列副推进器构成的高效能主动转向式矢量装置,不仅结构简单、成本低,而且通过主动转向的方式带动主体进行前行移动以及方向调节,提升矢量段调节角度范围,从而提高水下航行器的路径精准性,展现出高推进效率与可靠性;装置中的万向球头和圆周推进器支架等关键部件,允许矢量段在多个维度上进行灵活的角度调整,从而赋予了水下航行器卓越的机动性能和姿态调节能力;装置通过万向球头球形连接件内置的惯性器件实现闭环反馈控制,精确调控各推进器的输出功率和角度,确保航行器在复杂多变的海洋环境中实现高效能推进与灵活转向。
29、3)本发明利用一个主推进器以及以对称方式布置的多个副推进器作为动力元件,替代传统鳍舵,不仅简化航行器的内部结构,还保留了流线型外型的完整性,解决了传统构型水下航行器机动能力弱的问题,从而提升了整体可靠性,延长了航行器的使用寿命。在低航速环境中,本发明有效克服了舵效降低和响应时间增加导致的操作灵活性和效率受限,同时避免了推进器导致的机身反扭力矩影响,实现了对水下航行器运动和姿态的精确控制,进一步提升了其整体的推进效率与可靠性。
30、4)本发明通过调节各个推进机构的功率分配,显著提高了航行器水下航行时的机动能力和抗干扰能力,还克服了普通矢量推进auv运动能力受限的缺点,增加了运动的灵活性,使得航行器能在狭窄复杂的水下场景中工作,提高了航行器在流水中的作业性能,充分展示了其应用范围广、机动性高、鲁棒性高、稳定性好、灵活性高、噪音低和节能长续航的综合优势。
本文地址:https://www.jishuxx.com/zhuanli/20241118/331056.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表