一种自动泊车方法、装置和智能驾驶设备与流程
- 国知局
- 2024-08-02 16:34:47
本技术实施例涉及智能驾驶领域,更具体地,涉及一种自动泊车方法、装置和智能驾驶设备。
背景技术:
1、随着车辆行业的快速发展,产生了很多辅助驾驶、自动驾驶技术,可以减轻驾驶压力、提高安全性和便捷性,比如自动泊车技术。在当前技术背景下,通过自动泊车技术使车辆自动泊车入位的过程中,该车辆的运动状态,与人工泊车过程中车辆的运动状态,存在较大差异。通过自动泊车技术泊车入位,可能会影响泊车体验,甚至影响车内外人员的人身安全。
2、鉴于此,一种能够提高泊车体验的自动泊车的方案亟待开发。
技术实现思路
1、本技术实施例提供一种自动泊车方法、装置和智能驾驶设备,通过规划泊车速度,能够使得自动泊车过程中智能驾驶设备的运动状态更加类似于人工泊车场景下的表现,能够提升自动泊车体验。
2、第一方面,提供了一种自动泊车方法,该方法可以由智能驾驶设备执行,或者,也可以由智能驾驶设备中的终端如计算平台等执行,或者,也可以由智能驾驶设备中的芯片或电路执行,本技术实施例对此不做限定。
3、示例性地,该智能驾驶设备,可以是车辆。
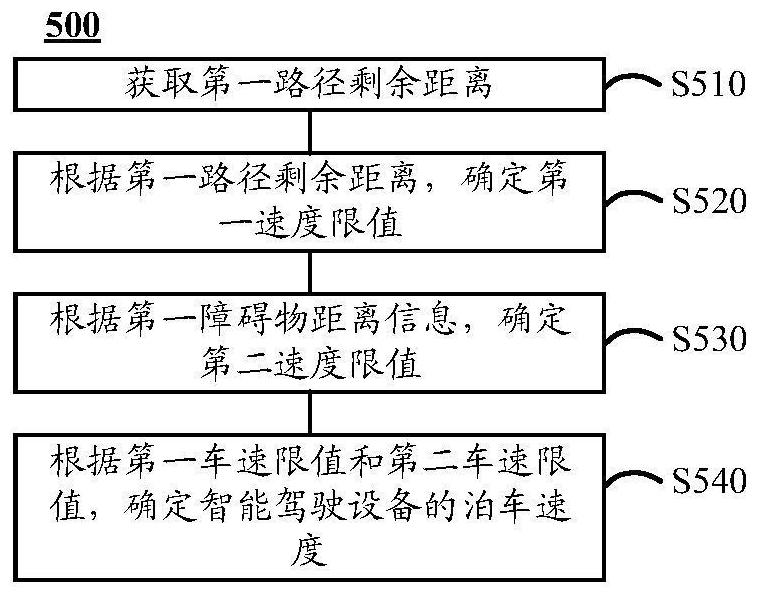
4、该方法可以包括:获取第一路径剩余距离,该第一路径剩余距离包括智能驾驶设备沿泊车规划路径与该泊车规划路径的终点间的距离;根据该第一路径剩余距离,确定第一速度限值;根据第一障碍物距离信息,确定第二速度限值,该第一障碍物距离信息包括该智能驾驶设备与该周边障碍物间的距离;根据该第一速度限值和该第二速度限值,确定该智能驾驶设备的泊车速度。
5、本技术中,基于路径剩余距离和障碍物距离信息,分别确定第一速度限值和第二速度限值,并由此确定该智能驾驶设备的泊车速度。能够在规划泊车速度的过程中,考虑路径剩余距离和障碍物距离对泊车速度的影响,能够使得自动泊车的泊车速度更加贴近于人工泊车场景下的泊车速度,能够提升自动泊车功能的用户体验。
6、结合第一方面,在第一方面的某些实现方式中,该根据该第一路径剩余距离,确定第一速度限值,可以包括:根据该泊车规划路径在该第一路径剩余距离内的多个路径点,确定该多个路径点中每个路径点与该泊车规划路径的终点间的路径剩余距离;根据该每个路径点与该泊车规划路径的终点间的路径剩余距离,确定该每个路径点对应的第一速度限值;该根据第一障碍物距离信息,确定第二速度限值,可以包括:根据该每个路径点对应的障碍物距离信息,确定该每个路径点对应的第二速度限值;该根据该第一速度限值和该第二速度限值,确定该智能驾驶设备的泊车速度,可以包括:根据该每个路径点对应的第一速度限值和对应的该第二速度限值,确定该每个路径点的泊车速度。
7、本技术中,通过确定第一路径剩余距离内的多个路径点所各自对应的第一速度限值和第二速度限值,能够规划各路径点的泊车速度,能够对剩余的泊车规划路径内的速度进行规划,能够使得所规划的泊车速度更加顺畅,能够提升所规划的泊车速度的及时性。
8、结合第一方面,在第一方面的某些实现方式中,该多个路径点包括第一路径点和第二路径点,该第二路径点为该第一路径点的预瞄距离内的路径点,该根据该每个路径点对应的障碍物距离信息,确定每个路径点对应的第二速度限值,可以包括:根据该第一路径点对应的障碍物距离,确定该第一路径点的障碍物速度限值;根据该第二路径点对应的障碍物距离,确定该第二路径点的障碍物速度限值;根据该第一路径点的障碍物速度限值和该第二路径点的障碍物速度限值,确定该第一路径点对应的第二速度限值。
9、本技术中,通过考虑预瞄特性,能够根据预瞄距离内的路径点的第二速度限值进行提前进行第二速度限值的调整,能够降低所规划的泊车速度在预瞄距离内的多个路径点处的波动,使得根据该第二速度限值所规划的泊车速度能够更加贴近于人工泊车场景。
10、结合第一方面,在第一方面的某些实现方式中,根据该第一路径点的障碍物速度限值和该第二路径点的障碍物速度限值,确定该第一路径点对应的第二速度限值,可以包括:将该第一路径点的障碍物速度限值和该第二路径点的障碍物速度限值间的最小值,确定为该第一路径点对应的第二速度限值。
11、本技术中,通过将第一路径点的障碍物速度限值和第二路径点的障碍物速度限值间的最小值,确定为该第一路径点对应的第二速度限值,能够在第二路径点的障碍物速度限值小于第一路径点的障碍物速度限值时,能够在预瞄距离内,对第二速度限值提前进行降速,使得根据该第二速度限值所规划的泊车速度能够更加贴近于人工泊车场景。
12、结合第一方面,在第一方面的某些实现方式中,该方法还可以包括:根据每个路径点的第二速度限值,确定每个路径点的历史第二速度限值,根据第一速度限值和第二速度限值,确定智能驾驶设备的泊车速度,可以包括:根据每个路径点的历史第二速度限值和每个路径点的第一速度限值,规划该智能驾驶设备的泊车速度。
13、本技术中,基于每个路径点的历史第二速度限值规划泊车速度,能够抑制第一速度限值和第二速度限值所形成的短时速度约束变化,能够抑制二者所造成的泊车速度的耦合扰动。
14、结合第一方面,在第一方面的某些实现方式中,该泊车规划路径在该第一路径剩余距离内包括第一路径区间、第二路径区间和第三路径区间,该第三路径区间内包括第一曲线和第二曲线的第一交点,该第一曲线是根据该每个路径点的第一速度限值构成的曲线,该第二曲线是根据该每个路径点的第二速度限值构成的曲线,该第三路径区间的路径剩余距离与该第一交点的路径剩余距离之间的差小于或等于预设值,该第一路径区间的路径剩余距离大于该第一交点的路径剩余距离,该第一路径区间的第一速度限值大于该第二速度限值,该第二路径区间的路径剩余距离小于该第一交点的路径剩余距离,该第二路径区间的第一速度限值小于该第二速度限值,该根据该每个路径点对应的第一速度限值和对应的该第二速度限值,确定该每个路径点的泊车速度,可以包括:根据在该第一路径区间和该第二路径区间内的该第一曲线和该第二曲线的最小值,确定该第一路径区间和该第二路径区间内的第三曲线;且,在该第一交点的速度限值的时间历程大于或等于第一阈值时,根据该第三路径区间内的该第一曲线和该第二曲线的最小值,确定该第三路径区间内的该第三曲线;或,在该第一交点的速度限值的时间历程小于该第一阈值时,根据第一分界点对应的第二速度限值和第二分界点对应的第一速度限值,确定该第三路径区间内的该第三曲线,该第一分界点为该第一路径区间和该第三路径区间的分界点,该第二分界点为该第二路径区间和该第三路径区间的分界点,该第三曲线用于指示该每个路径点的泊车速度。
15、本技术中,通过划分不同的路径区间,能够根据第一曲线和第二曲线在其第一交点处的速度限值的时间历程,对不同路径区间进行分段处理,制第一速度限值和第二速度限值所在该第一交点处所形成的短时速度约束变化,能够抑制二者所造成的泊车速度的耦合扰动。
16、结合第一方面,在第一方面的某些实现方式中,该方法还可以包括:根据该第一路径剩余距离和该智能驾驶设备的当前速度,确定第一参考速度;该根据该第一速度限值和该第二速度限值,确定该智能驾驶设备的泊车速度,可以包括:根据该第一速度限值、该第二速度限值和该第一参考速度,确定该智能驾驶设备的泊车速度。
17、本技术中,通过确定第一参考速度,能够使得在不同计算周期内所确定的泊车速度具有较高的一致性,能够避免不同计算周期内由于车辆运动而导致的同一路径点的泊车速度存在较大偏差。
18、结合第一方面,在第一方面的某些实现方式中,该方法还可以包括:根据该智能驾驶设备的运动状态参数和该泊车规划路径,确定该智能驾驶设备的实际泊车路径;根据该实际泊车路径,确定该智能驾驶设备是否存在碰撞风险。
19、本技术中,通过跟踪智能驾驶设备的实际泊车过程,预判是否存在碰撞风险,使得能够在存在碰撞风险时及时介入,提升自动泊车的安全性能。
20、结合第一方面,在第一方面的某些实现方式中,该方法还可以包括:在确定该智能驾驶设备存在碰撞风险时,确定刹车距离;根据刹车距离,控制智能驾驶设备刹车。
21、本技术中,在确定存在碰撞风险时,控制该智能驾驶设备刹车,能够保障车辆和人身安全。
22、结合第一方面,在第一方面的某些实现方式中,该方法还可以包括:根据该泊车规划路径,以及该智能驾驶设备的第一特征点在该泊车规划路径上的投影,确定该第一路径剩余距离,其中,该第一特征点用于构建该智能驾驶设备的智能驾驶设备坐标系。
23、由于智能驾驶设备在实际泊车过程中,其实际泊车路径与泊车规划路径可能存在偏差。本技术中,基于第一特征点在泊车规划路径上的投影,确定第一路径剩余距离,能够提升该方法对于泊车规划路径的适应性,能够避免由于实际泊车路径与泊车规划路径无法完全匹配而导致的无法适用的情形。
24、结合第一方面,在第一方面的某些实现方式中,该方法还可以包括:确定位于该智能驾驶设备侧方的障碍物;根据该智能驾驶设备侧方的障碍物,确定该第一障碍物距离信息。
25、本技术中,基于智能驾驶设备侧方的障碍物确定第一障碍物距离信息,能够降低确定第一障碍物距离信息所需的资源,能够提升规划泊车速度的及时性。
26、第二方面,提供了一种自动泊车装置,该装置可以包括:获取单元,用于获取第一路径剩余距离,该第一路径剩余距离包括智能驾驶设备沿泊车规划路径与该泊车规划路径的终点间的距离;处理单元,用于根据该第一路径剩余距离,确定第一速度限值;根据第一障碍物距离信息,确定第二速度限值,该第一障碍物距离信息包括该智能驾驶设备与该周边障碍物间的距离;根据该第一速度限值和该第二速度限值,确定该智能驾驶设备的泊车速度。
27、结合第二方面,在第二方面的某些实现方式中,该处理单元,可以用于:根据该泊车规划路径在该第一路径剩余距离内的多个路径点,确定该多个路径点中每个路径点与该泊车规划路径的终点间的路径剩余距离;根据该每个路径点与该泊车规划路径的终点间的路径剩余距离,确定该每个路径点对应的第一速度限值;根据该每个路径点对应的障碍物距离信息,确定该每个路径点对应的第二速度限值;根据该每个路径点对应的第一速度限值和对应的该第二速度限值,确定该每个路径点的泊车速度。
28、结合第二方面,在第二方面的某些实现方式中,该多个路径点包括第一路径点和第二路径点,该第二路径点为该第一路径点的预瞄距离内的路径点,该处理单元,可以用于:根据该第一路径点对应的障碍物距离,确定该第一路径点的障碍物速度限值;根据该第二路径点对应的障碍物距离,确定该第二路径点的障碍物速度限值;根据该第一路径点的障碍物速度限值和该第二路径点的障碍物速度限值,确定该第一路径点对应的第二速度限值。
29、结合第二方面,在第二方面的某些实现方式中,该处理单元可以用于:将该第一路径点的障碍物速度限值和该第二路径点的障碍物速度限值间的最小值,确定为该第一路径点对应的第二速度限值。
30、结合第二方面,在第二方面的某些实现方式中,该泊车规划路径在该第一路径剩余距离内包括第一路径区间、第二路径区间和第三路径区间,该第三路径区间内包括第一曲线和第二曲线的第一交点,该第一曲线是根据该每个路径点的第一速度限值构成的曲线,该第二曲线是根据该每个路径点的第二速度限值构成的曲线,该第三路径区间的路径剩余距离与该第一交点的路径剩余距离之间的差小于或等于预设值,该第一路径区间的路径剩余距离大于该第一交点的路径剩余距离,该第一路径区间的第一速度限值大于该第二速度限值,该第二路径区间的路径剩余距离小于该第一交点的路径剩余距离,该第二路径区间的第一速度限值小于该第二速度限值,该处理单元,可以用于:根据在该第一路径区间和该第二路径区间内的该第一曲线和该第二曲线的最小值,确定该第一路径区间和该第二路径区间内的第三曲线;且,在该第一交点的速度限值的时间历程大于或等于第一阈值时,根据该第三路径区间内的该第一曲线和该第二曲线的最小值,确定该第三路径区间内的该第三曲线;或,在该第一交点的速度限值的时间历程小于该第一阈值时,根据第一分界点对应的第二速度限值和第二分界点对应的第一速度限值,确定该第三路径区间内的该第三曲线,该第一分界点为该第一路径区间和该第三路径区间的分界点,该第二分界点为该第二路径区间和该第三路径区间的分界点,该第三曲线用于指示该每个路径点的泊车速度。
31、结合第二方面,在第二方面的某些实现方式中,该处理单元,还可以用于:根据该第一路径剩余距离和该智能驾驶设备的当前速度,确定第一参考速度;该处理单元,可以用于:根据该第一速度限值、该第二速度限值和该第一参考速度,确定该智能驾驶设备的泊车速度。
32、结合第二方面,在第二方面的某些实现方式中,该处理单元,还可以用于:根据该智能驾驶设备的运动状态参数和该泊车规划路径,确定该智能驾驶设备的实际泊车路径;根据该实际泊车路径,确定该智能驾驶设备是否存在碰撞风险。
33、结合第二方面,在第二方面的某些实现方式中,该处理单元,还可以用于:在确定该智能驾驶设备存在碰撞风险时,确定刹车距离;根据刹车距离,控制智能驾驶设备刹车。
34、结合第二方面,在第二方面的某些实现方式中,该处理单元,还可以用于:根据该泊车规划路径,以及该智能驾驶设备的第一特征点在该泊车规划路径上的投影,确定该第一路径剩余距离,其中,该第一特征点用于构建该智能驾驶设备的智能驾驶设备坐标系。
35、结合第二方面,在第二方面的某些实现方式中,该处理单元,还可以用于:确定位于该智能驾驶设备侧方的障碍物;根据该智能驾驶设备侧方的障碍物,确定该第一障碍物距离信息。
36、第三方面,提供了一种自动泊车装置,该装置包括:存储器,用于存储计算机程序;处理器,用于执行该存储器中存储的计算机程序,以使得该装置执行上述第一方面及其任一可能的实现方式中的方法。
37、第四方面,提供了一种智能驾驶设备,该智能驾驶设备包括上述第二方面或第三方面及其任一可能的实现方式中的装置。
38、第五方面,提供了一种计算机程序产品,上述计算机程序产品包括:计算机程序代码,当上述计算机程序代码在计算机上运行时,使得计算机执行上述第一方面任一种可能实现方式中的方法。
39、第六方面,提供了一种计算机可读存储介质,上述计算机可读介质存储有计算机程序,当上述计算机程序在计算机上运行时,使得计算机执行上述第一方面任一种可能实现方式中的方法。
40、第七方面,提供了一种芯片,该芯片包括电路,用于执行上述第一方面任一种可能实现方式中的方法。
本文地址:https://www.jishuxx.com/zhuanli/20240718/251363.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表