一种线控转向系统控制方法、装置、设备及存储介质与流程
- 国知局
- 2024-08-01 07:57:35
本发明属于汽车,具体的说是一种线控转向系统控制方法、装置、设备及存储介质。
背景技术:
1、近年来,随着汽车技术发展的不断进步,智能化水平越来越高,线控转向系统取消了转向柱和转向器之间的机械连接,使底盘横向控制与空间布置限制之间完全解耦,实现车辆动态可变速比、方向盘静默等功能,支持整车实现高级别自动驾驶功能,丰富了驾乘体验,是智能化转向系统未来发展的必然趋势。此外,因线控转向系统摆脱了机械连接的束缚,可节省车辆的布置和使用空间,实现了整车轻量化。线控转向系统包含路感模拟器和转向执行器两部分,二者之间通过电子信号进行交互。在“人控”模式下,通过驾驶员操控路感模拟器,转向执行器根据相关的输入信息完成指定的转向指令。在“自动驾驶”模式下,由自动驾驶控制器或整车控制器对线控转向系统进行控制,路感模拟器可保持“静止”状态,驾驶员在“车控”模式下解放双手来做更多的事情。当车辆由自动驾驶模式切换到驾驶员接管模式时,因路感模拟器在“自动驾驶”模式下处于静止状态,而转向执行器按车辆的控制可能处于转向状态,其与路感模拟器在控制上存在不同步现象。当驾驶员需要对车辆进行控制时,路感模拟器与转向执行器必须保持角度“同步”对应状态,否则在“人控”模式下将导致车辆不按驾驶员操控意图执行,造成安全事故。
技术实现思路
1、本发明提供了一种线控转向系统控制方法、装置、设备及存储介质,通过搭载线控转向系统的车辆在行车过程中驾驶员从“车控”到“人控”接管的控制策略,使线控转向系统完成转角同步操作并校验,避免其在驾驶员接管时出现安全问题。
2、本发明技术方案结合附图说明如下:
3、第一方面,本发明实施例提供了一种线控转向系统控制方法,包括以下步骤:
4、步骤一、接收驾驶员接管请求使能信号后,同时对整车控制器信号、自动驾驶控制器信号、路感模拟器状态信号和转向执行器状态信号进行判断,确保相关系统均处于正常工作且能够控制的状态;
5、步骤二、判断车速,当车辆车速超出预设目标阈值范围时,请求整车控制器或自动驾驶控制器降低车速至阈值范围内;
6、步骤三、在接管请求处于正常状态的前提下,对比转向执行器和路感模拟器的转角信息,计算二者之间的差值及符号;
7、步骤四、对路感模拟器要执行的目标转角和转速进行计算;
8、步骤五、判断车速、目标转角和转速的目标值,当车速、目标转角和转速的目标值均满足要求的阈值后,传递满足要求的信号;
9、步骤六、对路感模拟器电机进行控制;
10、步骤七、执行相应的目标值需求,完成路感模拟器与转向执行器的同步性操作;
11、步骤八、当完成行车过程中线控转向路感模拟器和转向执行器同步化操作后,将同步完成的状态位发送至仪表并提醒驾驶员可对车辆进行接管,此时车辆仍处于“车控”状态,路感模拟器与转向执行器保持同步且随动状态;此时驾驶员能够接管车辆,自动驾驶对转向系统的控制部分缓慢退出;
12、步骤九、基于路感模拟器实时反馈的转角、转矩和转速信号以及转向执行器实时反馈的转角和转速信号,进行接管后同步性状态校验,确认路感模拟器与转向执行器输出信号无异常后,将判断完成后的状态位发送至仪表,仪表显示接管成功完成信息。
13、进一步的,所述步骤三中,对比转向执行器和路感模拟器的转角信息包括转角、转角方向、转速、转速方向、转角的状态位和转速的状态位。
14、进一步的,所述步骤四中,路感模拟器要执行的目标转角通过下式计算:
15、
16、式中,θ执行为转向执行器当前转角;θ路感为路感模拟器转角。
17、进一步的,所述步骤四中,路感模拟器要执行的转速通过下式计算:
18、
19、式中,kω为可标定的增益值;v为车速;ω路感为路感模拟器转速;ω执行为转向执行器转速。
20、进一步的,所述步骤七中,目标值指目标转角和目标转速。
21、进一步的,所述步骤九中,同步性校验是路感模拟器的转角值和转速值与转向执行器的转角值和转速值进行比较,差值在定义的阈值范围内则认为二者已同步,
22、策略原理如下:
23、|θ路感-θ执行|≤阈值1;
24、|ω路感-ω执行|≤阈值2。
25、第二方面,本发明实施例还提供了一种线控转向系统控制装置,包括:
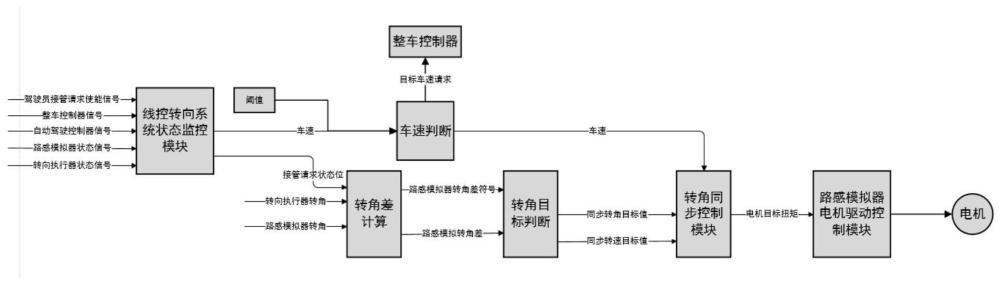
26、线控转向系统状态监控模块,用于接收驾驶员接管请求使能信号后,同时对整车控制器信号、自动驾驶控制器信号、路感模拟器状态信号和转向执行器状态信号进行判断,确保相关系统均处于正常工作且能够控制的状态;
27、车速判断模块,用于判断车速,当车辆车速超出预设目标阈值范围时,请求整车控制器或自动驾驶控制器降低车速至阈值范围内;
28、对比模块,用于在接管请求处于正常状态的前提下,对比转向执行器和路感模拟器的转角信息,计算二者之间的差值及符号;
29、计算模块,用于对路感模拟器要执行的目标转角和转速进行计算;
30、转角目标判断模块,用于判断车速、目标转角和转速的目标值,当车速、目标转角和转速的目标值均满足要求的阈值后,传递满足要求的信号;
31、转角同步控制模块,用于对路感模拟器电机进行控制;
32、路感模拟器电机驱动控制模块,用于执行相应的目标值需求,完成路感模拟器与转向执行器的同步性操作;
33、同步完成判断模块,用于当完成行车过程中线控转向路感模拟器和转向执行器同步化操作后,将同步完成的状态位发送至仪表并提醒驾驶员可对车辆进行接管,此时车辆仍处于“车控”状态,路感模拟器与转向执行器保持同步且随动状态;此时驾驶员能够接管车辆,自动驾驶对转向系统的控制部分缓慢退出;
34、同步性校验模块,用于基于路感模拟器实时反馈的转角、转矩和转速信号以及转向执行器实时反馈的转角和转速信号,进行接管后同步性状态校验,确认路感模拟器与转向执行器输出信号无异常后,将判断完成后的状态位发送至仪表,仪表显示接管成功完成信息。
35、第三方面,本发明实施例还提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如本发明实施例中任一所述的一种线控转向系统控制方法。
36、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明实施例中任一所述的一种线控转向系统控制方法。
37、本发明的有益效果为:
38、1)本发明通过设计自动驾驶状态下驾驶员接管时的控制策略,使车辆控制权从“车控”状态顺利切换至“人控”状态,保证状态切换过程中性能平稳且安全可靠;
39、2)本发明通过设计搭载线控转向系统的车辆在行车过程中驾驶员从“车控”到“人控”接管的控制策略,使线控转向系统完成转角同步操作并校验,避免其在驾驶员接管时出现安全问题。
本文地址:https://www.jishuxx.com/zhuanli/20240722/229656.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表