一种轮足可变结构的多模态机器人及其模态切换控制方法
- 国知局
- 2024-08-01 07:59:17
本发明属于轮足机器人,特别涉及一种轮足可变结构的多模态机器人及其模态切换控制方法。
背景技术:
1、日常生活中,地面机器人的运动形式主要分为轮式和足式机器人两大类,轮式机器人可高移动速度且耗能低,但是越障能力十分有限;足式机器人有较高的越障能力,然而速度较慢且消耗能量较大。那有没有一个方案能够既适应多种复杂地形,又能提高能量转换率呢?答案便是“轮+足”。轮足机器人采用多个轮子组成的足部结构,在能耗效率、移动速度和负载能力方面相对于其他运动形式和复合移动形式的机器人具有更优异的表现,同时能够高效地在结构或非结构环境中运行。
2、但轮足变结构机器人需要能够适应不同的地形,如平坦地面和不规则地形之间如何切换,目前的环境适应性仍面临挑战,如何实现机器人在复杂地形中的稳定行走是目前需要解决的主要问题。
技术实现思路
1、有鉴于此,本发明的目的是针对现有技术的不足,提供一种轮足可变结构的多模态机器人,能根据不同的地形变化切换运动形态,提高机器人在复杂地形中的越野能力;本发明还提供一种模态切换控制方法,用于自动控制机器人轮式形态与足式形态的切换。
2、为达到上述目的,本发明采用以下技术方案:
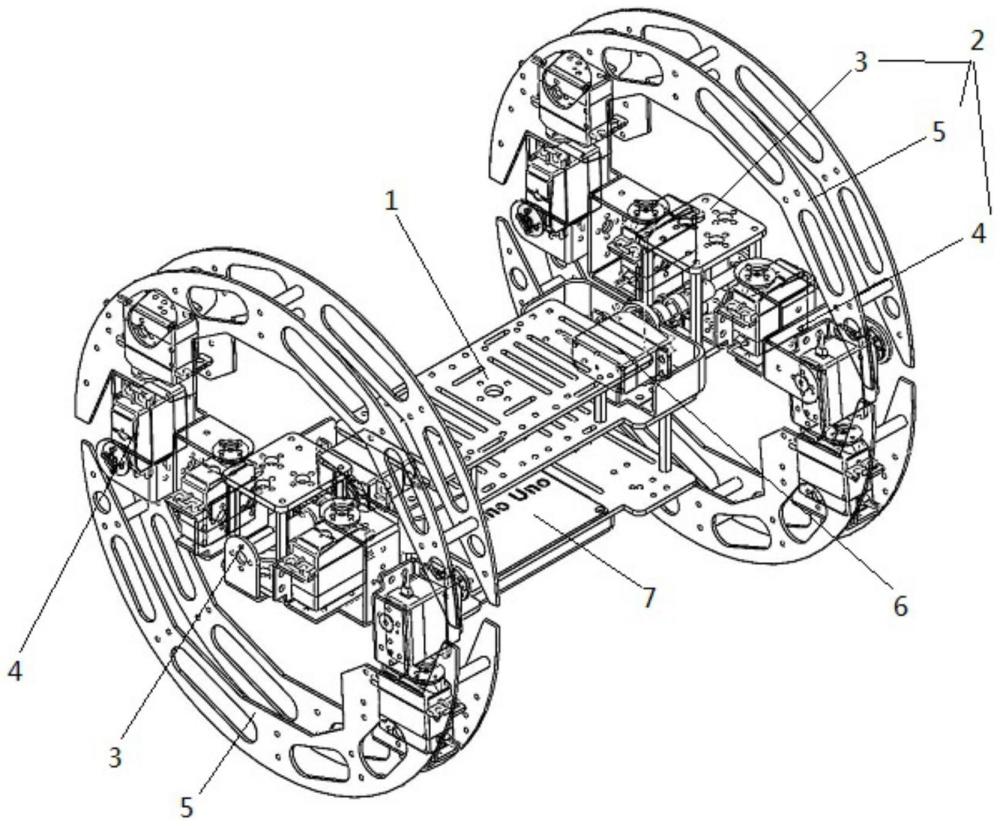
3、一种轮足可变结构的多模态机器人,包括主机身和转动设置在主机身左右两侧的轮足机构,轮足机构包括连接座、两个驱动模组和两个圆弧形行走架,主机身上设置有第一驱动装置驱动连接座旋转,两个驱动模组设置在连接座前后两端并分别连接至两个圆弧形行走架的端部,两个圆弧形行走架可首尾相接组成一个圆环形结构,驱动模组可驱动圆弧形行走架在x轴、y轴和z轴三个方向上回转摆动。
4、为了更好的实现本发明,在上述结构中作进一步的优化,驱动模组包括第一回转组、第二回转组和第三回转组,第一回转组与连接座在x轴方向上转动连接,第二回转组与第一回转组在y轴方向上转动连接,第三回转组与第二回转组在z轴方向上转动连接,第三回转组还固定连接至圆弧形行走架的端部。
5、为了更好的实现本发明,在上述结构中作进一步的优化,第一回转组包括x驱动装置和x回转支架,x驱动装置驱动x回转支架与连接座在x轴方向上转动连接。
6、为了更好的实现本发明,在上述结构中作进一步的优化,第二回转组包括y驱动装置和y回转支架,y驱动装置驱动y回转支架与x回转支架在y轴方向上转动连接。
7、为了更好的实现本发明,在上述结构中作进一步的优化,第三回转组包括z驱动装置和z回转支架,z驱动装置驱动z回转支架与y回转支架在z轴方向上转动连接,z回转支架固定连接至圆弧形行走架的端部。
8、为了更好的实现本发明,在上述结构中作进一步的优化,第一驱动装置设置两个并且分别驱动两个连接座旋转。
9、为了更好的实现本发明,在上述结构中作进一步的优化,第一驱动装置、x驱动装置、y驱动装置和z驱动装置均为伺服电机,主机身上设置有主控板和图像传感器,主控板电连接图像传感器、第一驱动装置、x驱动装置、y驱动装置和z驱动装置。
10、为了更好的实现本发明,在上述结构中作进一步的优化,主机身为多层机构,主机身采用碳纤维材质,第一驱动装置通过联轴器与连接座转动连接。
11、为了更好的实现本发明,在上述结构中作进一步的优化,圆弧形行走架包括两个足板和若干个支撑柱,两个足板通过支撑柱固定连接。
12、一种上述的轮足可变结构的多模态机器人的模态切换控制方法,当图像传感器探测到前方没有障碍时,图像传感器将信号传输给主控板,主控板控制四个x驱动装置驱动x回转支架旋转,使圆弧形行走架与主机身垂直,然后控制前侧两个驱动模组的z驱动装置驱动z回转支架旋转180度,然后控制四个y驱动装置驱动y回转支架向内侧旋转,直至左右两侧的两组圆弧形行走架均首尾相接组成一个圆环形结构;
13、当图像传感器探测到前方有障碍时,图像传感器将信号传输给主控板,主控板控制前侧两个驱动模组的z驱动装置驱动z回转支架向外侧旋转45度,然后控制后侧两个驱动模组的y驱动装置驱动y回转支架旋转135度,然后控制前侧两个驱动模组的z驱动装置驱动z回转支架向外侧继续旋转135度,并控制前侧两个驱动模组的y驱动装置驱动y回转支架旋转45度,使四个圆弧形行走架端部与地面接触。
14、本发明相较于现有技术具有以下有益效果:
15、1.本发明提供的轮足可变结构的多模态机器人独创设计了可顺滑切换的二轮式与四足式两种运动形态,在两轮轮式运动遇到障碍物时,可以通过转换为四足式来跨越障碍物,提高机器人的越野能力,具有结构紧凑、地形适应性强、移动效率高等优点。
16、2.本发明提供的模态切换控制方法在机器人行进时,可以根据路况自动切换二轮式与四足式两种运动形态。
技术特征:1.一种轮足可变结构的多模态机器人,其特征在于:包括主机身(1)和转动设置在所述主机身(1)左右两侧的轮足机构(2),所述轮足机构(2)包括连接座(3)、两个驱动模组(4)和两个圆弧形行走架(5),所述主机身(1)上设置有第一驱动装置(6)驱动所述连接座(3)旋转,两个所述驱动模组(4)设置在所述连接座(3)前后两端并分别连接至两个所述圆弧形行走架(5)的端部,两个所述圆弧形行走架(5)可首尾相接组成一个圆环形结构,所述驱动模组(4)可驱动所述圆弧形行走架(5)在x轴、y轴和z轴三个方向上回转摆动。
2.根据权利要求1所述的轮足可变结构的多模态机器人,其特征在于:所述驱动模组(4)包括第一回转组(401)、第二回转组(402)和第三回转组(403),所述第一回转组(401)与所述连接座(3)在x轴方向上转动连接,所述第二回转组(402)与所述第一回转组(401)在y轴方向上转动连接,所述第三回转组(403)与所述第二回转组(402)在z轴方向上转动连接,所述第三回转组(403)还固定连接至所述圆弧形行走架(5)的端部。
3.根据权利要求2所述的轮足可变结构的多模态机器人,其特征在于:所述第一回转组(401)包括x驱动装置(4011)和x回转支架(4012),所述x驱动装置(4011)驱动所述x回转支架(4012)与所述连接座(3)在x轴方向上转动连接。
4.根据权利要求3所述的轮足可变结构的多模态机器人,其特征在于:所述第二回转组(402)包括y驱动装置(4021)和y回转支架(4022),所述y驱动装置(4021)驱动所述y回转支架(4022)与所述x回转支架(4012)在y轴方向上转动连接。
5.根据权利要求4所述的轮足可变结构的多模态机器人,其特征在于:所述第三回转组(403)包括z驱动装置(4031)和z回转支架(4032),所述z驱动装置(4031)驱动所述z回转支架(4032)与所述y回转支架(4022)在z轴方向上转动连接,所述z回转支架(4032)固定连接至所述圆弧形行走架(5)的端部。
6.根据权利要求5所述的轮足可变结构的多模态机器人,其特征在于:所述第一驱动装置(6)设置两个并且分别驱动两个所述连接座(3)旋转。
7.根据权利要求6所述的轮足可变结构的多模态机器人,其特征在于:所述第一驱动装置(6)、所述x驱动装置(4011)、所述y驱动装置(4021)和所述z驱动装置(4031)均为伺服电机,所述主机身(1)上设置有主控板(7)和图像传感器,所述主控板(7)电连接所述图像传感器、所述第一驱动装置(6)、所述x驱动装置(4011)、所述y驱动装置(4021)和所述z驱动装置(4031)。
8.根据权利要求7所述的轮足可变结构的多模态机器人,其特征在于:所述主机身(1)为多层机构,所述主机身(1)采用碳纤维材质,所述第一驱动装置(6)通过联轴器(601)与所述连接座(3)转动连接。
9.根据权利要求8所述的轮足可变结构的多模态机器人,其特征在于:所述圆弧形行走架(5)包括两个足板(501)和若干个支撑柱(502),两个所述足板(501)通过所述支撑柱(502)固定连接。
10.一种如权利要求7-9中任一项所述的轮足可变结构的多模态机器人的模态切换控制方法,其特征在于:当所述图像传感器探测到前方没有障碍时,所述图像传感器将信号传输给所述主控板(7),所述主控板(7)控制四个所述x驱动装置(4011)驱动所述x回转支架(4012)旋转,使所述圆弧形行走架(5)与所述主机身(1)垂直,然后控制前侧两个所述驱动模组(4)的所述z驱动装置(4031)驱动所述z回转支架(4032)旋转180度,然后控制四个所述y驱动装置(4021)驱动所述y回转支架(4022)向内侧旋转,直至左右两侧的两组所述圆弧形行走架(5)均首尾相接组成一个圆环形结构;
技术总结本发明涉及一种轮足可变结构的多模态机器人及其模态切换控制方法,包括主机身和转动设置在主机身左右两侧的轮足机构,轮足机构包括连接座、两个驱动模组和两个圆弧形行走架,主机身上设置有第一驱动装置驱动连接座旋转,两个驱动模组设置在连接座前后两端并分别连接至两个圆弧形行走架的端部,两个圆弧形行走架可首尾相接组成一个圆环形结构,驱动模组可驱动圆弧形行走架在x轴、y轴和z轴三个方向上回转摆动。本发明提供的轮足可变结构的多模态机器人独创设计了二轮式与四足式两种运动形态,具有结构紧凑、地形适应性强、移动效率高等优点。本发明提供的模态切换控制方法在机器人行进时,可以根据路况自动切换轮式与足式两种运动形态。技术研发人员:苗忆南,张益鑫,杨卓林,胡江川,武文杰,齐健,王冬受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240722/229793.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表