摩托车的制作方法
- 国知局
- 2024-08-01 08:19:57
本申请涉及驾驶设备,特别是涉及一种摩托车。
背景技术:
1、相关技术中,摩托车在辅助驾驶方面存在较多缺陷,不利于保障驾驶员的人身安全。例如,相关技术的盲区检测方法,通过摩托车的后方雷达探测预先规划的功能区域,若探测到功能区域内存在目标物体,则触发报警。然而,相关技术的盲区检测方法,仅支持车辆在较大弯道半径(例如500米)的道路上行驶时才会正确触发报警,而当弯道半径较小时(例如小于500米),会大概率漏报,干扰驾驶员对路况的判断。
2、针对相关技术中,摩托车的盲区检测无法准确预警的问题,目前还未提出有效的解决方案。
技术实现思路
1、在本实施例中提供了一种摩托车,提高在特殊场景下预警的准确性。
2、一种摩托车包括主体、车轮、悬架系统、动力系统及操控系统;主体包括前部和后部,前部和后部之间设置有至少一个驾乘区域;车轮包括前车轮和后车轮;悬架系统连接至主体下端,悬架系统包括前悬架和后悬架,前车轮通过前悬架连接至前部,后车轮通过后悬架连接至后部;动力系统至少部分支撑在主体上,用于为摩托车的运行提供动力,前车轮和后车轮至少其中之一传动连接至动力系统;操控系统包括转向组件,转向组件设置于主体的前部;摩托车还包括检测模块和雷达模块,检测模块布置于所述主体,用于采集所述摩托车的横摆角速度;雷达模块布置在所述主体的后部,与所述检测模块连接,在所述摩托车处于预设状态的情况下,所述雷达模块能够发射预设角度的电磁波,且所述预设角度均与所述摩托车相匹配,所述雷达模块能够基于所发射的电磁波采集预设区域内目标物体的信息,且所述预设区域位于所述预设角度所形成的区域内;所述雷达模块能够根据所述横摆角速度调整所述预设区域,并基于调整后的所述预设区域执行预警任务。
3、在其中的一些实施例中,所述雷达模块能够根据所述横摆角速度计算所述摩托车行驶时的弯道半径,并根据计算得到的弯道半径调整所述预设区域。
4、在其中的一些实施例中,当所述雷达模块计算得到弯道半径小于第一阈值时,所述雷达模块拓宽预先规划的所述预设区域,并基于拓宽后的所述预设区域执行所述预警任务;当所述雷达模块计算得到弯道半径不小于所述第一阈值时,所述雷达模块按照预先规划的所述预设区域执行所述预警任务。
5、在其中的一些实施例中,所述雷达模块在执行所述预警任务且检测到目标物体时,所述雷达模块触发报警。
6、在其中的一些实施例中,所述检测模块还用于采集所述摩托车的倾斜角度,当所述雷达模块判定所述倾斜角度大于第三阈值时,所述雷达模块关闭报警。
7、在其中的一些实施例中,所述预设区域包括第一区域和第二区域,所述第一区域相较于所述第二区域靠近所述摩托车,所述预警任务包括以下至少之一:
8、若所述第一区域内有目标物体,所述雷达模块执行预警;若所述第二区域内有目标物体,且所述目标物体距所述摩托车的距离与两者之间相对速度的比值低于一时间,所述雷达模块执行预警。
9、在其中的一些实施例中,所述第一区域和所述第二区域均包括两子区域,且所述第一区域和所述第二区域的两子区域均对称分布在所述摩托车的后方。
10、在其中的一些实施例中,所述检测模块包括:6d陀螺仪。
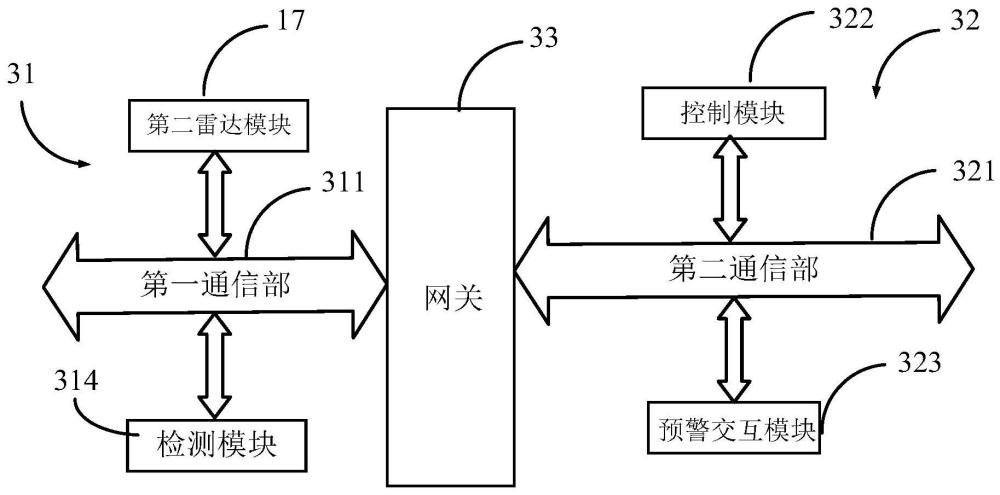
11、在其中的一些实施例中,所述摩托车还包括:第一通信部,所述检测模块和所述雷达模块分别挂载在所述第一通信部上,所述雷达模块通过所述第一通信部获取所述检测模块采集的信息。
12、在其中的一些实施例中,所述摩托车还包括:电源模块,分别与所述检测模块和所述雷达模块连接。
13、与相关技术相比,在本实施例中提供的一种摩托车,包括检测模块和雷达模块,检测模块布置于所述主体,用于采集所述摩托车的横摆角速度;雷达模块布置在所述主体的后部,与所述检测模块连接,在所述摩托车处于预设状态的情况下,所述雷达模块能够发射预设距离和预设角度的电磁波,且所述预设距离和所述预设角度均与所述摩托车相匹配,所述雷达模块能够基于所发射的电磁波采集预设区域内目标物体的信息,且所述预设区域位于所述预设距离与所述预设角度所形成的区域内;所述雷达模块能够根据所述横摆角速度调整所述预设区域,并基于调整后的所述预设区域执行预警任务,提高在特殊场景下预警的准确性。
14、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:1.一种摩托车,包括:
2.根据权利要求1所述的摩托车,其特征在于,所述雷达模块能够根据所述横摆角速度计算所述摩托车行驶时的弯道半径,并根据计算得到的弯道半径调整所述预设区域。
3.根据权利要求2所述的摩托车,其特征在于,当所述雷达模块计算得到弯道半径小于第一阈值时,所述雷达模块拓宽预先规划的所述预设区域,并基于拓宽后的所述预设区域执行所述预警任务;当所述雷达模块计算得到弯道半径不小于所述第一阈值时,所述雷达模块按照预先规划的所述预设区域执行所述预警任务。
4.根据权利要求1所述的摩托车,其特征在于,所述雷达模块在执行所述预警任务且检测到目标物体时,所述雷达模块触发报警。
5.根据权利要求4所述的摩托车,其特征在于,所述检测模块还用于采集所述摩托车的倾斜角度,当所述雷达模块判定所述倾斜角度大于第三阈值时,所述雷达模块关闭报警。
6.根据权利要求1所述的摩托车,其特征在于,所述预设区域包括第一区域和第二区域,所述第一区域相较于所述第二区域靠近所述摩托车,所述预警任务包括以下至少之一:
7.根据权利要求6所述的摩托车,其特征在于,所述第一区域和所述第二区域均包括两子区域,且所述第一区域和所述第二区域的两子区域均对称分布在所述摩托车的后方。
8.根据权利要求1所述的摩托车,其特征在于,所述检测模块包括:6d陀螺仪。
9.根据权利要求1所述的摩托车,其特征在于,所述摩托车还包括:第一通信部,所述检测模块和所述雷达模块分别挂载在所述第一通信部上,所述雷达模块通过所述第一通信部获取所述检测模块采集的信息。
10.根据权利要求1所述的摩托车,其特征在于,所述摩托车还包括:电源模块,分别与所述检测模块和所述雷达模块连接。
技术总结本申请涉及一种摩托车,包括检测模块和雷达模块,检测模块布置于所述主体,用于采集所述摩托车的横摆角速度;雷达模块布置在所述摩托车的后部,与所述检测模块连接,在所述摩托车处于预设状态的情况下,所述雷达模块能够发射预设角度的电磁波,且所述预设距离和所述预设角度均与所述摩托车相匹配,所述雷达模块能够基于所发射的电磁波采集预设区域内目标物体的信息,且所述预设区域位于所述预设距离与所述预设角度所形成的区域内;所述雷达模块能够根据所述横摆角速度调整所述预设区域,并基于调整后的所述预设区域执行预警任务,提高在特殊场景下预警的准确性。技术研发人员:张毅,李东受保护的技术使用者:浙江春风动力股份有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240722/231238.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。