摩托车的制作方法
- 国知局
- 2024-08-01 08:19:57
本申请涉及驾驶设备,特别是涉及一种摩托车。
背景技术:
1、相关技术中,摩托车在辅助驾驶方面存在较多缺陷,不利于保障驾驶员的人身安全。而且,由于摩托车空间有限,通常只装载必要零件,若要在摩托车上安装辅助驾驶零件,且要使得辅助驾驶零件发挥应有的作用,以满足相应的辅助驾驶需求,将会在空间布局上存在困难。
2、针对相关技术中,摩托车辅助驾驶功能不完善,目前还未提出有效的解决方案。
技术实现思路
1、在本实施例中提供了一种摩托车,解决摩托车辅助驾驶功能不完善的问题。
2、一种摩托车,包括主体、车轮、悬架系统、动力系统及操控系统;主体包括前部和后部,前部和后部之间设置有至少一个驾乘区域;车轮包括前车轮和后车轮;悬架系统连接至主体下端,悬架系统包括前悬架和后悬架,前车轮通过前悬架连接至主体前部,后车轮通过后悬架连接至主体后部;动力系统至少部分支撑在主体上,用于为摩托车的运行提供动力,前车轮和后车轮至少其中之一传动连接至动力系统;操控系统包括转向组件,转向组件设置于主体的前部;摩托车还包括雷达模块,在所述摩托车处于预设状态的情况下所述雷达模块能够发射预设角度的电磁波,且所述预设角度均与所述摩托车相匹配,所述雷达模块能够基于所发射的电磁波采集预设区域内目标物体的信息,且所述预设区域位于所述预设角度所形成的区域内;其中,至少一个所述雷达模块布置在所述主体的前部或者后部,且布置在所述主体前部的雷达模块位于所述前车轮的上方。
3、在其中的一些实施例中,将布置在所述主体前部的雷达模块定义为第一雷达模块,用于执行自适应巡航和前碰撞预警,所述自适应巡航和所述前碰撞预警分别对应的预设区域的宽度沿所述摩托车左右方向的宽度均不超过2.5m。
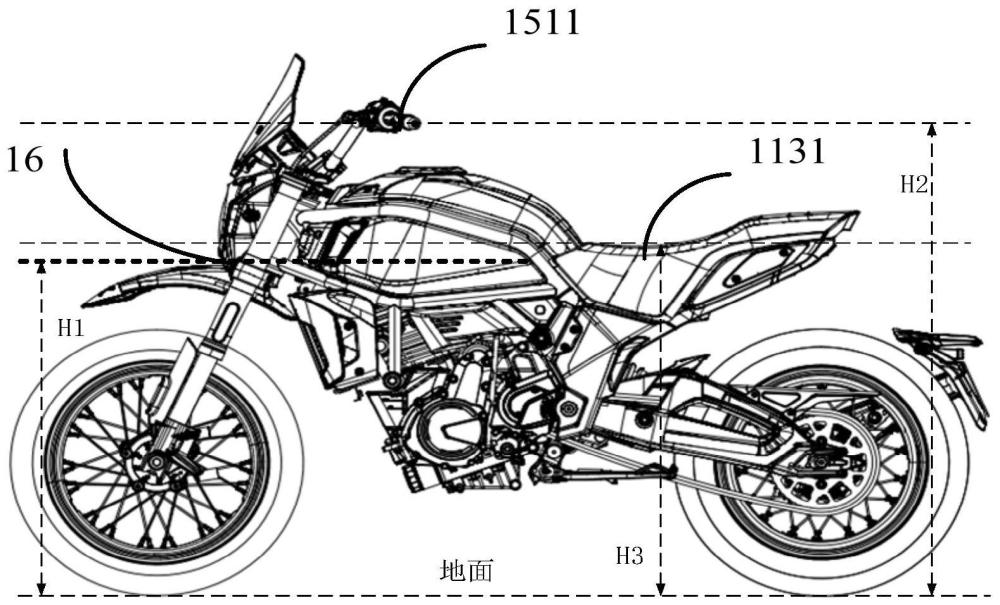
4、在其中的一些实施例中,所述转向组件包括把手,所述第一雷达模块的最低点离地高度为第一高度,所述把手的轴线与所述把手外端面的交点离地高度为第二高度,所述第一高度与所述第二高度的比值大于等于0.35且小于等于0.75。
5、在其中的一些实施例中,所述驾乘区域设置有驾驶员坐垫,所述驾驶员坐垫最低点离地高度为第三高度,所述第一高度与所述第三高度的比值大于等于0.4小于等于1.1。
6、在其中的一些实施例中,还包括前大灯,设置于所述前车轮的上方,所述第一雷达模块设置在所述前大灯中央或者下方。
7、在其中的一些实施例中,所述摩托车包括:将布置在所述主体后部的雷达模块定义为第二雷达模块,用于执行盲区检测和变道辅助,所述盲区检测对应的预设区域相较于所述变道辅助对应的预设区域靠近所述摩托车。
8、在其中的一些实施例中,所述盲区检测对应的预设区域和所述变道辅助对应的预设区域均包括两子区域,且所述盲区检测对应的预设区域和所述变道辅助对应的预设区域的两子区域均对称分布在所述摩托车的后方;所述摩托车还包括尾灯,设置于所述后车轮的上方,所述第二雷达模块设置在所述尾灯中央或者下方。
9、在其中的一些实施例中,所述第二雷达模块还用于执行后碰撞预警,所述后碰撞预警对应的预设区域位于所述盲区检测对应的预设区域的两子区域之间,所述转向组件还包括左把手和右把手,所述后碰撞预警对应的预设区域沿所述摩托车左右方向的宽度不超过2.5m,且不低于所述左把手与所述右把手之间的宽度,其中,所述左把手与所述右把手之间的宽度为所述左把手的轴线与左把手外端面的交点距所述右把手的轴线与右把手外端面的交点的距离。
10、在其中的一些实施例中,所述摩托车还包括第一通信部、第二通信部和网关,所述第一通信部和所述第二通信部通过网关连接,所述雷达模块挂载在所述第一通信部上,所述控制模块挂载在所述第二通信部上,其中,所述雷达模块为毫米波雷达。
11、在其中的一些实施例中,所述摩托车包括:第三雷达模块和第四雷达模块,分别布置在所述摩托车的左右两侧,用于执行交叉车流预警。
12、在其中的一些实施例中,所述摩托车还包括控制模块、第一通信部、第二通信部和网关,所述第一通信部和所述第二通信部通过网关连接,所述雷达模块挂载在所述第一通信部上,所述控制模块挂载在所述第二通信部上,其中,所述雷达模块为毫米波雷达。
13、与相关技术相比,在本实施例中提供的一种摩托车,包括雷达模块,在所述摩托车处于预设状态的情况下所述雷达模块能够发射预设角度的电磁波,且所述预设角度均与所述摩托车相匹配,所述雷达模块能够基于所发射的电磁波采集预设区域内目标物体的信息,且所述预设区域位于所述预设角度所形成的区域内;其中,至少一个所述雷达模块布置在所述摩托车的前部或者后部,且布置在所述摩托车前部的雷达模块位于所述前车轮的上方,使摩托车辅助驾驶功能更完善。
14、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:1.一种摩托车,包括:
2.根据权利要求1所述的摩托车,其特征在于,将布置在所述主体前部的雷达模块定义为第一雷达模块,用于执行自适应巡航和前碰撞预警,所述自适应巡航和所述前碰撞预警分别对应的预设区域的宽度沿所述摩托车左右方向的宽度均不超过2.5m。
3.根据权利要求2所述的摩托车,其特征在于,所述转向组件包括把手,所述第一雷达模块的最低点离地高度为第一高度,所述把手的轴线与所述把手外端面的交点离地高度为第二高度,所述第一高度与所述第二高度的比值大于等于0.35且小于等于0.75。
4.根据权利要求3所述的摩托车,其特征在于,所述驾乘区域设置有驾驶员坐垫,所述驾驶员坐垫最低点离地高度为第三高度,所述第一高度与所述第三高度的比值大于等于0.4小于等于1.1。
5.根据权利要求4所述的摩托车,其特征在于,还包括前大灯,设置于所述前车轮的上方,所述第一雷达模块设置在所述前大灯中央或者下方。
6.根据权利要求2所述的摩托车,其特征在于,将布置在所述主体后部的雷达模块定义为第二雷达模块,用于执行盲区检测和变道辅助,所述盲区检测对应的预设区域相较于所述变道辅助对应的预设区域靠近所述摩托车。
7.根据权利要求6所述的摩托车,其特征在于,所述盲区检测对应的预设区域和所述变道辅助对应的预设区域均包括两子区域,且所述盲区检测对应的预设区域和所述变道辅助对应的预设区域的两子区域均对称分布在所述摩托车的后方;
8.根据权利要求7所述的摩托车,其特征在于,所述第二雷达模块还用于执行后碰撞预警,所述后碰撞预警对应的预设区域位于所述盲区检测对应的预设区域的两子区域之间,所述转向组件还包括左把手和右把手,所述后碰撞预警对应的预设区域沿所述摩托车左右方向的宽度不超过2.5m,且不低于所述左把手与所述右把手之间的宽度,其中,所述左把手与所述右把手之间的宽度为所述左把手的轴线与左把手外端面的交点距所述右把手的轴线与右把手外端面的交点的距离。
9.根据权利要求6所述的摩托车,其特征在于,还包括第三雷达模块和第四雷达模块,分别布置在所述摩托车的左右两侧,用于执行交叉车流预警。
10.根据权利要求1所述的摩托车,其特征在于,还包括控制模块、第一通信部、第二通信部和网关,所述第一通信部和所述第二通信部通过网关连接,所述雷达模块挂载在所述第一通信部上,所述控制模块挂载在所述第二通信部上,其中,所述雷达模块为毫米波雷达。
技术总结本申请涉及一种摩托车,包括雷达模块,在所述摩托车处于预设状态的情况下所述雷达模块能够发射预设角度的电磁波,且所述预设角度均与所述摩托车相匹配,所述雷达模块能够基于所发射的电磁波采集预设区域内目标物体的信息,且所述预设区域位于所述预设角度所形成的区域内;其中,至少一个所述雷达模块布置在所述摩托车的前部或者后部,且布置在所述摩托车前部的雷达模块位于所述前车轮的上方,使摩托车辅助驾驶功能更完善。技术研发人员:杨春,李东受保护的技术使用者:浙江春风动力股份有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240722/231239.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。