弹簧式磁控形状记忆合金执行器的指定收敛模式自适应输出反馈控制方法
- 国知局
- 2024-11-19 10:01:18
本发明涉及智能材料及其驱动机构的控制领域,具体为在迟滞非线性和系统不确定性影响下的一种弹簧式磁控形状记忆合金执行器的指定收敛模式自适应输出反馈控制方法。
背景技术:
1、磁性形状记忆合金执行器具有很强的主被动变形能力,而且该执行器具有组装灵活、体积输出比大等特点,在医疗器械、生物操作等领域得到了广泛的应用。然而,在对该执行器进行控制算法设计和应用时,执行器本身所具有的如下三个特性会限制其控制性能:1)输入输出之间的迟滞行为,2)环境因素、磁控形状记忆合金的物理性质和外部负载导致的系统不确定性;3)制造过程造成的输出位移测量不精确性。
2、为了消除该执行器的迟滞非线性,学者们开发了无需逆模型的鲁棒控制和基于迟滞逆模型的控制方法。在无需逆模型的鲁棒控制方法中,由于不涉及逆模型信息,从而可以设计得到较为简单的控制框架。而基于迟滞逆模型的控制方法由于需要计算逆模型,控制器实施较为复杂。但需要说明的是,上述两种设计思路已成功应用于压电执行器和超磁致伸缩执行器中。但磁控形状记忆合金执行器的迟滞非线性与这两种执行器中的迟滞特性相比具有更大程度的迟滞效应,已有方法无法直接处理磁控形状记忆合金执行器所具有的大程度的迟滞效应。因此,设计一种有效的控制方法来处理磁控形状记忆合金执行器的复杂迟滞非线性从而提高系统的暂稳态性能,是我们所必须解决的难题。
3、对于执行器所在闭环系统形成的非线性系统,系统状态和输出中存在的不确定性问题也是必须要解决的。对于系统状态不确定性,学者们研究了不同增长条件下非线性系统的稳定问题和输出反馈控制问题。此外,由于系统期望输出和可测量输出之间存在偏差,测量不确定性问题也需要考虑,以补偿时变传感器灵敏度对执行器输出反馈控制的影响。现有文献针对存在传感器故障的非线性系统提出了几种自适应反步进控制方案,这些方法的一个关键假设是偏置故障的可微分性。但对实际系统而言,期望输出和实际测量值之间的数学关系难以明确,而偏置故障的可微分性更无法确定。因此,在实际应用中只能保证传感器的不确定性是未知有界的。
4、已有控制方法可实现磁控形状记忆合金执行器的高精度跟踪控制,然而,已有控制策略的一个共同特点是只关注了系统稳态阶段的控制性能。而瞬态性能也是验证轨迹跟踪控制有效性的一个重要因素。近来,有限时间/固定时间/预设时间控制方案在很多实际应用对象中发挥了重要作用。尤其是预设时间控制可以保证系统收敛时间和收敛误差带,引起了学者们的广泛关注。但需要注意的是,现有的一些规定时间控制器仅在规定时间间隔内有效,并在规定时间内可能会出现无穷增益现象。这两个问题给控制器的实际应用带来了困难。因此,为磁控形状记忆合金执行器设计具有指定收敛模式的控制框架具有很强的实际意义。
5、因此,如何在迟滞非线性和系统不确定性影响下,为磁控形状记忆合金执行器开发一种能够提升系统暂稳态性能、保证系统满足指定收敛模式的高精度自适应控制技术,尚未见到相关内容。
技术实现思路
1、本发明为了解决迟滞非线性和系统不确定性影响下的磁控形状记忆合金执行器轨迹跟踪控制的问题,提供了一种弹簧式磁控形状记忆合金执行器的指定收敛模式自适应输出反馈控制方法。
2、本发明是通过如下技术方案来实现的:一种弹簧式磁控形状记忆合金执行器的指定收敛模式自适应输出反馈控制方法,包括如下步骤:
3、注:本发明对以下符号定义为:(估计误差=实际量-估计量)。
4、s1:根据弹簧式磁控形状记忆合金执行器的系统模型描述,设计具有状态估计和指定时间收敛特性的指定时间观测器;具体如下:
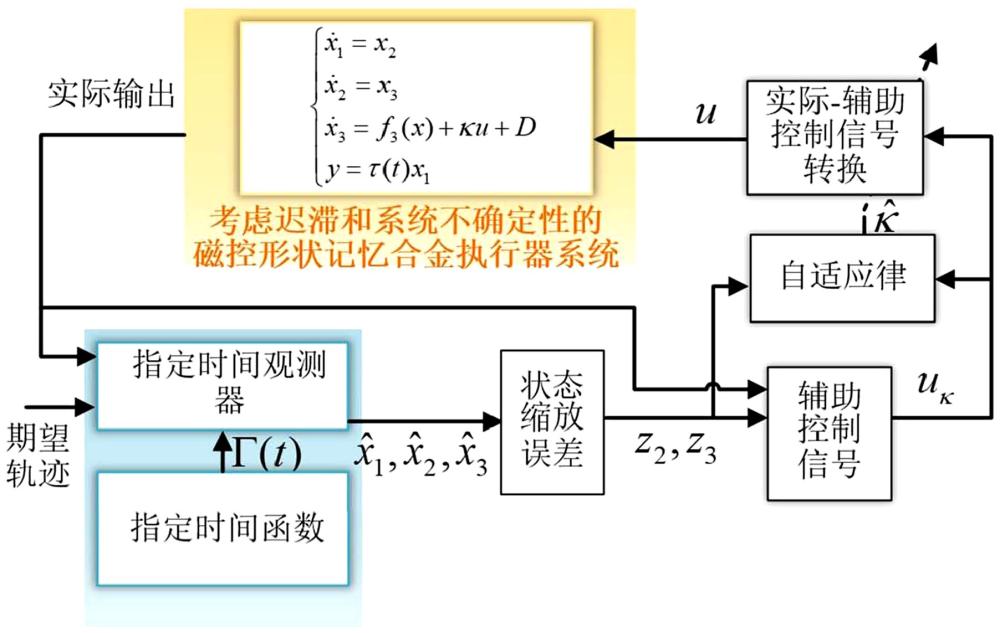
5、将考虑迟滞和系统不确定性的弹簧式磁控形状记忆合金执行器的非线性系统描述为:
6、
7、其中,x1,x2,x3和y分别是系统状态变量和系统输出;f3(·)是此系统的未知非线性函数,且满足对x连续和局部lipschitz;τ(t)≠0是系统输出的测量不确定性,且是未知时变的连续函数;κ是系统的未知控制增益,满足0<κ<(k0γ)2;d是系统的未知外部扰动且满足是干扰上界;u是此系统的输入;
8、在系统模型(1)中,κu+d表示将迟滞非线性分解为线性部分κu和非线性部分d;f3(x)和τ(t)分别为系统状态不确定性和系统输出的测量不确定性,统称为系统不确定性;设定f3(x)和τ(t)满足如下假设:
9、假设ⅰ:存在常数非线性函数f3(·)满足
10、假设ⅱ:τ(t)的上界已知,即对于未知连续函数τ(t),存在灵敏度误差使得
11、基于系统模型(1),针对弹簧式磁控形状记忆合金执行器带有输入迟滞、状态不可测和系统不确定性问题,设计能够同时观测系统状态并保证系统具有指定时间收敛特性的指定时间观测器,具体过程为:
12、s1-1:设计能保证系统指定收敛模式的指定时间函数γ,定义为函数构造为:
13、
14、其中,tu是用户指定的系统调节时间,与系统初始状态无关;0<β<1是设计常数,用来调整跟踪误差带;ω≥2是整数;
15、函数具有三个性质:一是是连续的,且从初值单调递减到终值二是在时间区间t∈(0,+∞)内是c1;三是在时间区间t∈(tu,+∞)内函数的三个性质让指定时间函数γ能够实现“指定时间内系统跟踪误差收敛到预设误差带”这一指定收敛模式;
16、s1-2:针对系统模型(1),利用指定时间函数γ,设计指定时间观测器为:
17、
18、其中,yd(t)是期望参考轨迹;对于实际轨迹跟踪控制而言,yd(t)及其一阶导数是已知且有界的,即满足不等式其中和为正常数;h1,h2,h3表示正的设计参数,通过合理选择这些参数,以确保是hurwitz;对任意给定常数存在矩阵s=st>0和满足hts+sh≤-2i3和υs+sυ≥0。
19、s2:通过定义观测器误差、跟踪误差、观测器缩放误差向量和状态缩放误差向量,设计李雅普诺夫函数v并对时间进行一阶求导得到具体如下:
20、基于式(1)和式(3),指定时间观测器误差定义如下:
21、
22、跟踪误差为:
23、
24、观测器缩放误差定义为:
25、
26、系统的可测状态x1和不可测状态对应的状态缩放误差为:
27、
28、其中,k0≥1是由设计者决定的常值增益;
29、根据式(4)、(6)和(7),设计李雅普诺夫函数v为:
30、v=vo+vz+va (8)
31、其中,vo=ξtsξ,vz=ztqz,分别是观测器缩放误差向量ξ=[ξ1,ξ2,ξ3]t、状态缩放误差向量z=[z1,z2,z3]t和自适应误差的李雅普诺夫函数;
32、李雅普诺夫函数对时间进行求导,从而得到导数为:
33、
34、s3:基于步骤s1中的指定时间观测器和步骤s2中的并利用δ修正自适应技术,为系统的未知控制增益设计自适应律;具体如下:
35、由于系统模型(1)中的控制增益κ是和迟滞相关的未知参数,并且受迟滞影响,控制增益的变化对系统的跟踪性能影响较大,基于步骤s2中计算得到的李雅普诺夫稳定理论和δ修正自适应技术,为增益设计了如下的自适应律:
36、
37、其中,π1,π2是正设计参数,且κ(0)≥0。
38、s4:基于步骤s1~s3、李雅普诺夫稳定理论、反步法和指定时间收敛准则,获得能够保证系统性能满足指定收敛模式的自适应输出反馈控制器,以实现迟滞非线性和系统不确定影响下弹簧式磁控形状记忆合金执行器的高精度轨迹跟踪控制效果,具体如下:
39、对于实际控制信号u和辅助控制信号uκ之间设计如下转换关系:
40、
41、基于设计的观测器(3)和状态缩放误差(7),设计自适应输出反馈控制器为:
42、
43、其中,l1,l2,l3是正设计参数且存在矩阵q=qt,使得ltq+ql≤-2i3,υq+qυ≥0;
44、将步骤s3中的式(10)和步骤s4中的式(12)代入步骤s2中式(9)中的并根据李雅普诺夫稳定理论和指定时间收敛准则能够知晓:通过合理选择控制系统中的设计参数,就能够保证在迟滞非线性和系统不确定性影响下弹簧式磁控形状记忆合金执行器的控制性能满足指定收敛模式。
45、与现有技术相比本发明具有以下有益效果:本发明所提供的一种弹簧式磁控形状记忆合金执行器的指定收敛模式自适应输出反馈控制方法,用于提升磁控形状记忆合金执行器的暂稳态控制性能。该方法主要有以下三个优点:一是通过引入指定时间函数γ(t),构造能够保证系统具有指定收敛模式的指定时间观测器。该观测器可以在线实时观测系统的内部状态,并借助于指定时间函数,保证观测所得系统状态指定时间收敛特性,可以克服现有技术中无法处理复杂迟滞引起的磁控形状记忆合金执行器暂态性能受限的问题。二是本发明中通过定义基于指定时间函数γ(t)的观测器缩放误差和状态缩放误差,采用系统状态重构的手段,所构建的自适应控制器可确保系统在整个运行时间中都正常运作,所提出的控制器可以克服现有的指定时间控制方法出现无穷增益现象的缺陷,从而进一步提升控制器的暂态性能。三是本发明针对磁控形状记忆合金执行器运行过程中出现的测量不确定性导致无法获得系统输出真实信息的问题,设计了能够处理系统不确定性(即系统状态不确定性和测量不确定性)的自适应输出反馈控制器,弥补了现有方法中未能处理磁控形状记忆合金执行器测量品质不佳引起的控制效果不足。本发明所提供的控制方法为磁控形状记忆合金执行器的高品质跟踪控制应用奠定了基础,且更贴近于工程需求。
本文地址:https://www.jishuxx.com/zhuanli/20241118/331146.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表