一种消除商用车高速自动驾驶横风扰动控制方法及系统与流程
- 国知局
- 2024-11-25 15:13:51
本发明涉及自动驾驶领域,具体地,涉及一种消除商用车高速自动驾驶横风扰动控制方法及系统。
背景技术:
1、自动驾驶汽车作为新一轮科技革命和产业融合创新的重要载体,已经成为全球汽车产业发展的重要战略方向。商用车自动驾驶运行路线单一,载货属性也不需要考虑自动驾驶舒适性,只需要考虑行车安全,因此商用车是最具备商业落地前景的l4级别自动驾驶技术搭载车型。l4级别自动驾驶能够不依赖驾驶员实现正常天气条件下的车辆自动驾驶功能。但是在商用车高速行驶过程中,车辆横风是影响车辆横向控制精度的重要影响因素,横风相当于给车辆施加了一个外部的横向力,导致车辆产生非预期的横向位移,控制系统识别到产生横向偏差后,会立刻对偏差进行修正,当车辆回到道路中心线后,又会横向补偿,此时车辆又会偏移中心线,如此往复,造成车辆在中心线一侧左右摇摆,对行车稳定性及其他交通参与者都会造成安全影响。同时商用车由于其侧边面积大、底盘高,在车辆自动驾驶高速行驶时更容易受到横风影响导致车辆左右摇摆产生“画龙”现象,影响自动驾驶控制精度,引发安全事故。
2、现有技术中公开了一种横风下的车辆控制方法,主要通过车辆摄像头识别道路横风标志,从而通过辅助驾驶系统主动接管车辆降速通过横风区域。这种方法依赖于道路标牌,但是大部分空旷路段都没有标牌,因此应用范围非常有限,且这是一套辅助驾驶系统,方法不适用于自动驾驶车辆。可见,目前在自动驾驶技术发展中,对应横风干扰没有传感器能够识别当前风速、车辆横向受力等关键信息,因此目前没有较好的解决方案,只能通过限制车辆最大运行速度,从而降低横向扰动影响,但是这种方式极大限制了商用车运行效率。
3、可见,在商用车自动驾驶车辆运行期间,有必要设计合适的控制策略,避免横风造成的影响,提高商业车高速行驶时的稳定性和抗外部扰动的能力,从而保障行驶安全。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种消除商用车高速自动驾驶横风扰动控制方法及系统,有效应对高速下的横风扰动,提高自动驾驶车辆在横风扰动下的横向控制精度。
2、为实现上述技术效果,本发明采用如下所述技术方案:
3、根据本发明的第一个方面,提供一种消除商用车高速自动驾驶横风扰动控制方法,具体包括以下步骤:
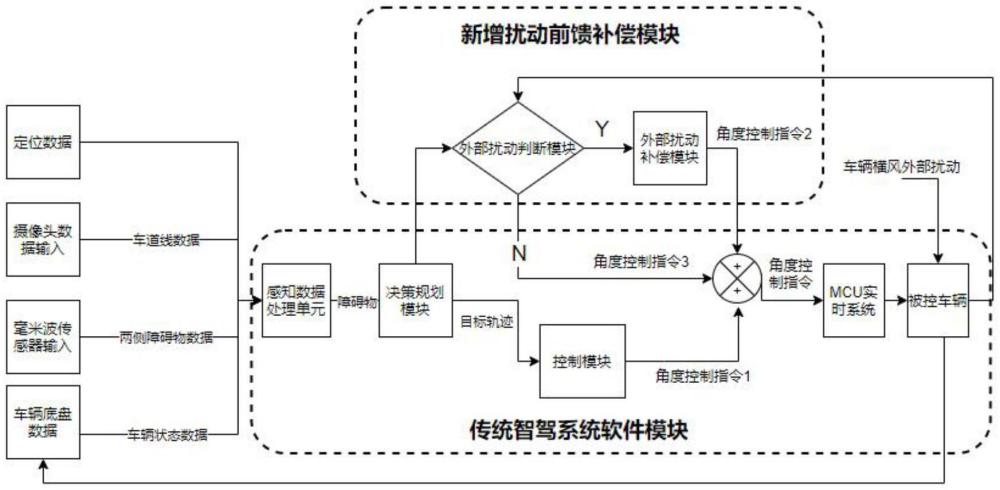
4、步骤s1.感知数据处理单元接收车载传感器输入信息,识别周围环境信息,并输出障碍物信息给规划模块;
5、步骤s2.决策规划模块根据实车周围环境信息,实时规划出安全、舒适的车辆目标行驶轨迹给控制模块;控制模块根据车辆实际定位与目标位置的偏差,通过优化算法计算出目标控制指令1;
6、步骤s3.增加扰动前馈补偿模块,所述扰动前馈补偿模块由两部分组成,一是外部扰动判断模块,二是外部扰动补偿模块;将车辆纵向速度、横向速度、横向加速度、横摆角速度、轨迹目标曲率、航向角、航向角速率作为模块输入,产生因对外部侧向扰动的补偿值,输出角度控制指令,具体包括以下步骤:
7、s3.1外部扰动补偿模型建立,具体包括车辆受力模型和误差模型的建立和横风扰动建模与滑模控制,并得出角度补偿的计算公式:
8、
9、其中,vx为车辆纵向速度,cf为前轮侧偏刚度,cr为后轮侧偏刚度,为横向位移变化率,lf为前轴中心到质心的距离,lr为后轴中心到质心的距离,为横摆角速率,δf为前轮转角,λ为滑模面系数,λ>0,;
10、s3.2外部扰动的判断与补偿计算:外部扰动判断模块根据车辆实际横向加速度、横向速度、车辆横摆角数据,判断车辆是否受外界横风扰动,若判断此时车辆未受外界横风扰动,外部扰动判断模块输出角度控制指令3等于0;若判断此时车辆受到有规律的外部扰动,根据s3.1中的角度补偿的计算公式计算当前扰动的补偿量δfd,并输出外部扰动补偿模块输出角度控制指令2等于δfd;
11、步骤s4.将步骤s3中算出的角度控制指令2或角度控制指令3的角度补偿量累加至目标角度控制量中;
12、步骤s5.通过mcu实时系统将累加后的目标角度控制量通过总角度控制指令下发至车辆转向执行器,以此实现存在横风扰动时的补偿,所述总角度控制指令=角度控制指令1+角度控制指令2+角度控制指令3。
13、优选地,步骤s1中,所述车载传感器输入信息包括:定位数据、包括车道线数据的摄像头数据、包括两侧障碍物数据的毫米波传感器输入的信息以及包括车辆底盘数据的车辆状态数据。
14、优选地,在步骤s3.1中,所述车辆受力模型为下式(1):
15、
16、式中,vx为车辆纵向速度,cf为前轮侧偏刚度,cr为后轮侧偏刚度,为横向位移变化率,lf为前轴中心到质心的距离,lr为后轴中心到质心的距离,为横摆角速率,δf为前轮转角,iz为车辆的纵向惯性矩;
17、所述误差模型为:
18、ey=yact-yref (2)
19、
20、式中,yact为车辆实际位置y轴坐标,yref为目标轨迹点y轴坐标,ρ为目标轨迹点曲率;
21、自动驾驶控制过程中,需要计算合适的δf,使得ey=0,
22、优选地,在步骤s3.1中的横风扰动建模与滑模控制,选择滑膜面函数如下:
23、
24、式中,λ为滑模面系数,λ>0,将式(2)和式(3)中表达式代入式(4),并对滑模面s进行一阶求导得:
25、
26、车辆到达稳态后,一阶滑模面求解可得扰动下前轮转角补偿值δfd
27、
28、式中,α1为一预设正数,通过调节α1的大小可以改变系统的收敛时间。
29、优选地,在步骤s3.2中,外部扰动判断模块通过最小二乘法拟合变化曲线判断车辆是否受到有规律的外部扰动,当拟合曲线变化周期小于设定阈值时,判断此时车辆未受到有规律的外部扰动;当拟合曲线的变化存在变化周期大于设定阈值时,判断此时车辆受到有规律的外部扰动。
30、根据本发明的第二个方面,提供一种消除商用车高速自动驾驶横风扰动控制系统,用于实施上述的消除商用车高速自动驾驶横风扰动控制方法,具体包括以下组成部分:
31、感知数据处理单元:用于接收车载传感器输入信息,识别周围环境信息,并输出障碍物信息给决策规划模块;
32、决策规划模块:用于根据实车周围环境信息,实时规划出安全、舒适的车辆目标行驶轨迹给控制模块;
33、控制模块:用于根据车辆实际定位与目标位置的偏差,通过优化算法计算出目标控制指令1;
34、外部扰动判断模块:用于根据车辆实际横向加速度、横向速度、车辆横摆角数据,通过最小二乘法拟合变化曲线,判断此时车辆是否受到有规律的外部扰动,若判断此时车辆不受有规律的外部扰动,则输出目标控制指令3=0;
35、外部扰动补偿模块:当外部扰动判断模块判断此时车辆受到有规律的外部扰动时,本模块根据目标轨迹的曲率ρ、当前车辆横向加速度目标横向加速度车辆当前速度vx,车辆当前横摆角速度以及当前车辆航向和目标航向差计算当前时刻扰动的补偿量,并输出目标控制指令2;
36、角度控制指令汇总模块:用于将角度控制指令2或角度控制指令3的角度补偿量累加至角度控制指令1中,形成总角度控制指令,并将该总角度控制指令发送至mcu实时系统;
37、mcu实时系统:用于将累加后的总角度控制指令下发至车辆转向执行器,以此实现存在横风扰动时的补偿,所述总角度控制指令=角度控制指令1+角度控制指令2+角度控制指令3。
38、与现有技术相比,本发明具有如下的有益效果:
39、本发明提供的消除商用车高速自动驾驶横风扰动控制方法属于一种低成本方案,不需要额外新增传感器,只做软件算法上的调整就能在不影响商用车的运行车速的前提下,在外部扰动下不需要降速行驶,有效应对高速下的横风扰动,提高了自动驾驶车辆在横风扰动下的横向控制精度。
本文地址:https://www.jishuxx.com/zhuanli/20241125/336858.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表