一种陆空两栖消防救援球状机器人
- 国知局
- 2024-12-26 16:17:20
本技术属于机器人领域,尤其是涉及一种陆空两栖消防救援球状机器人。
背景技术:
1、随着城市建筑的不断增多和人口密集度的增加,火灾风险也逐渐升高。在现代都市中,大型建筑、购物中心、工业区和住宅区的增加使得火灾成为日常安全管理中的一项重要挑战。因此,各种类型的灭火技术和工具得到了广泛的应用,其中包括干粉灭火器的广泛使用。干粉灭火器作为一种高效的灭火工具,在处理火灾时被广泛采用。然而,尽管其能够快速扑灭火焰,但在大型空间内使用时,往往会产生大量的粉尘。一旦大规模使用,这些粉尘会在整个空间弥漫,给后续的火灾监测和处理工作带来了困难和挑战。
2、传统消防无人机的一般为多旋翼无人机其螺旋桨工作时又势必会搅动激起更多粉尘,又进一步增加了监测难度。相比之下,消防监测机器人受环境因素影响较小,但易受复杂地形的限制,行动诸多不便,工作效率低下。
3、这就需要一种可以完成多种工作任务,能够在地上跑,也能在空中飞,实现在陆地和空中的平稳转换的新型机器人。
技术实现思路
1、有鉴于此,本实用新型旨在提出一种陆空两栖消防救援球状机器人。
2、为达到上述目的,本实用新型的技术方案是这样实现的:
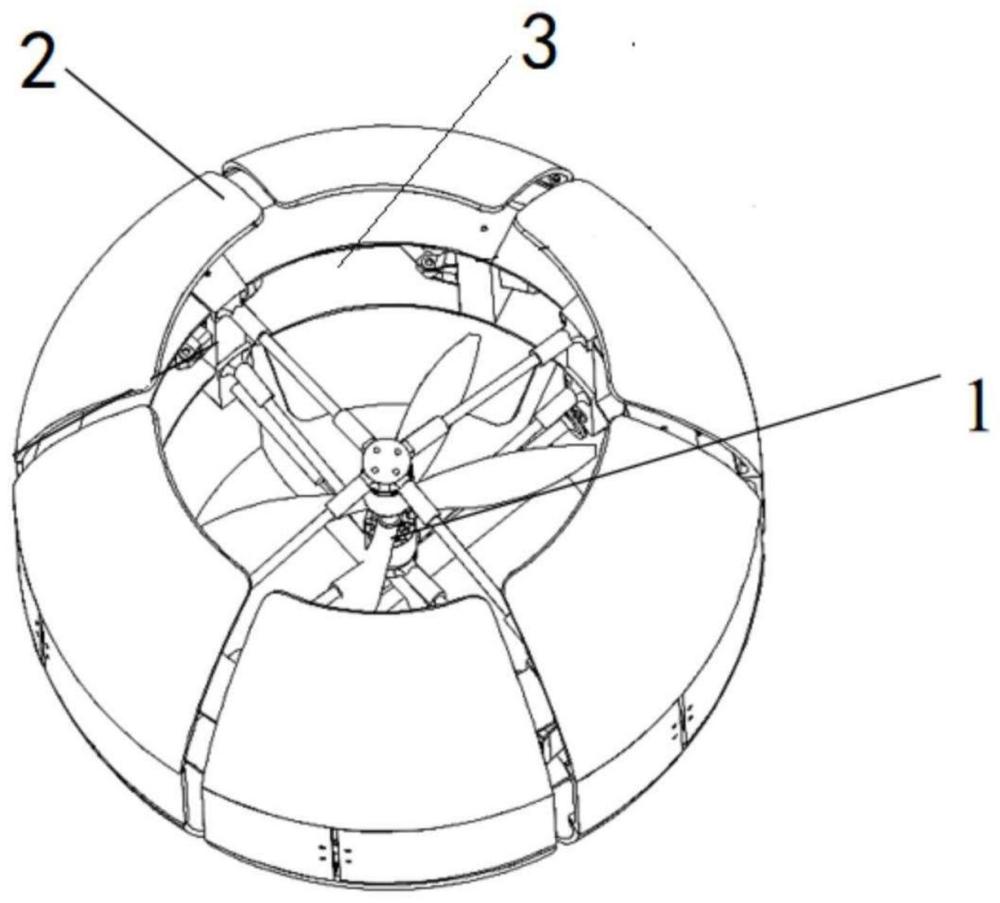
3、一种陆空两栖消防救援球状机器人,包括球状外壳(2)和位于球状外壳(2)中间的无人机;
4、所述无人机包括动力系统(1)和固定支架(3);所述球状外壳(2)将所述固定支架(3)包裹在其中;所述固定支架(3)对中间的所述动力系统(1)进行支撑;所述动力系统(1)包括两个同轴向的旋转方向相反的螺旋桨,两个所述螺旋桨固定在固定支架(3)的中间;
5、所述球状外壳(2)由若干片外壳组件拼接而成,每一片所述外壳组件包括中间的滚动机构和位于所述滚动机构两侧的保护板(21),所述滚动机构包括支撑板(22)和转动板(23),所述支撑板(22)和转动板(23)之间活动连接,所述支撑板(22)和两侧的保护板(21)连接,还包括可伸缩的推杆(24),所述推杆(24)的一端与支撑板(22)连接,所述推杆的另一端与转动板(22)连接。
6、进一步的,所述固定支架(3)包括上下两个环状固定架(31),两个环状固定架(31)之间通过设置的若干支柱(32)连接,两个所述螺旋桨分别固定在两个环状固定架(31)的中间;
7、所述螺旋桨安装在对应的电机上,一个电机对应一个环状固定架(31),每一个所述电机的电机座通过若干辐射状分布的连接杆固定在对应的环状固定架(31)的中心;
8、两个所述螺旋桨朝里对向放置。
9、进一步的,所述无人机还包括转向系统(4),所述转向系统(4)安装在下方的环状固定架的底部;
10、所述转向系统(4)包括两个舵机(41)和分别与两个舵机对应的两个矢量舵面(42),所述矢量舵面(42)的中间带有缺口,两个矢量舵面(42)交错垂直安装。
11、进一步的,所述矢量舵面(42)的顶部固定有转向杆(43),所述转向杆(43)与固定在环状固定架上的舵机(41)连接。
12、进一步的,下方的所述环状固定架的底部设置有4个均匀分布的带有销孔的支撑架(44),对向的两个支撑架(44)为一组,每组支撑架(44)撑起一个转向杆(43),所述转向杆(43)的一端穿过一个支撑架(44)的销孔,与对应的舵机(41)连接,所述转向杆的另一端,伸入另一个对应的支撑架(44)的销孔,可以在销孔中转动。
13、进一步的,所述舵机(41)通过操纵舵盘(45)来驱动矢量舵面(42)旋转以完成转向运动。
14、进一步的,所述支撑板(22)上设置有气缸或液压缸或直线电机,所述推杆(24)与气缸或液压缸或直线电机连接,可以进行伸缩;或者所述推杆(24)就是所述气缸或液压缸或直线电机的输出部位。
15、进一步的,所述气缸或液压缸或直线电机通过底座安装在支撑板(22)。
16、进一步的,每一个所述支撑板(22)上还设置了转向舵机,所述转向舵机安装在相邻的固定支架(3)上,所述支撑板(22)受转向舵机控制进行转向。
17、进一步的,所述球状外壳(2)由若干片外壳组件拼接而成,每一片所述外壳组件固定在所述固定支架(3)上,多片所述外壳组件组成一个带有中心孔的球形。
18、本实用新型具有的优点和积极效果是:
19、1、本方案将球形机器人与球状无人机结合,以球形机器人的地面运动为主,弥补了无人机续航能力差和机器人越障能力差的不足,发挥了无人机响应速度快,越障能力强的优势,二者优势互补,取长补短,实用价值更高。
20、2、本方案采用舵机组协调配合转动整个球壳完成转弯和姿态转换,既实现了陆地滚动和转弯的稳定性,又保证了姿态转换的快速性、灵活性。
21、3、本方案以球状无人机的外壳作为地面运动姿态的动力组,不仅对机载设备起到保护作用,还减少了冗余的机械结构对整机重量的影响。球状外壳使得机器人拥有360度全向运动能力和广阔的观察视角,运动灵活机动性更强。
技术特征:1.一种陆空两栖消防救援球状机器人,其特征在于:包括球状外壳(2)和位于球状外壳(2)中间的无人机;
2.根据权利要求1所述的陆空两栖消防救援球状机器人,其特征在于:所述固定支架(3)包括上下两个环状固定架(31),两个环状固定架(31)之间通过设置的若干支柱(32)连接,两个所述螺旋桨分别固定在两个环状固定架(31)的中间;
3.根据权利要求1所述的陆空两栖消防救援球状机器人,其特征在于:所述无人机还包括转向系统(4),所述转向系统(4)安装在下方的环状固定架的底部;
4.根据权利要求3所述的陆空两栖消防救援球状机器人,其特征在于:所述矢量舵面(42)的顶部固定有转向杆(43),所述转向杆(43)与固定在环状固定架上的舵机(41)连接。
5.根据权利要求4所述的陆空两栖消防救援球状机器人,其特征在于:下方的所述环状固定架的底部设置有4个均匀分布的带有销孔的支撑架(44),对向的两个支撑架(44)为一组,每组支撑架(44)撑起一个转向杆(43),所述转向杆(43)的一端穿过一个支撑架(44)的销孔,与对应的舵机(41)连接,所述转向杆的另一端,伸入另一个对应的支撑架(44)的销孔,可以在销孔中转动。
6.根据权利要求5所述的陆空两栖消防救援球状机器人,其特征在于:所述舵机(41)通过操纵舵盘(45)来驱动矢量舵面(42)旋转以完成转向运动。
7.根据权利要求1所述的陆空两栖消防救援球状机器人,其特征在于:所述支撑板(22)上设置有气缸或液压缸或直线电机,所述推杆(24)与气缸或液压缸或直线电机连接,可以进行伸缩;或者所述推杆(24)就是所述气缸或液压缸或直线电机的输出部位。
8.根据权利要求7所述的陆空两栖消防救援球状机器人,其特征在于:所述气缸或液压缸或直线电机通过底座安装在支撑板(22)。
9.根据权利要求1所述的陆空两栖消防救援球状机器人,其特征在于:每一个所述支撑板(22)上还设置了转向舵机,所述转向舵机安装在相邻的固定支架(3)上,所述支撑板(22)受转向舵机控制进行转向。
10.根据权利要求1所述的陆空两栖消防救援球状机器人,其特征在于:所述球状外壳(2)由若干片外壳组件拼接而成,每一片所述外壳组件固定在所述固定支架(3)上,多片所述外壳组件组成一个带有中心孔的球形。
技术总结本技术提供一种陆空两栖消防救援球状机器人,包括球状外壳和位于球状外壳中间的无人机;所述无人机包括动力系统和固定支架;所述球状外壳将所述固定支架包裹在其中;所述固定支架对中间的所述动力系统进行支撑;所述动力系统包括两个同轴向的旋转方向相反的螺旋桨,两个所述螺旋桨固定在固定支架的中间。本技术的有益效果是:本方案将球形机器人与球状无人机结合,以球形机器人的地面运动为主,弥补了无人机续航能力差和机器人越障能力差的不足,发挥了无人机响应速度快,越障能力强的优势,二者优势互补,取长补短,实用价值更高。技术研发人员:马芝明,王忠强,马超,姜云彬,沈建冰,刘帛菡,刘顺礼,祁濛,马二强受保护的技术使用者:中国民航大学技术研发日:20240426技术公布日:2024/12/12本文地址:https://www.jishuxx.com/zhuanli/20241216/349101.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表