机器人喷涂的控制方法、装置、电子设备及存储介质
- 国知局
- 2024-07-08 10:59:41
本技术涉及机器人,具体而言,本技术涉及一种机器人喷涂的控制方法、装置、电子设备及存储介质。
背景技术:
1、建筑业是我国国民经济的支柱型产业之一,对经济发展、人民就业、维持社会稳定和保障民生等方面起着重要作用。在未来,建筑业依然是推动我国经济发展的重要动力。其中,室内装修作为建筑行业的重要组成部分,直接影响着房屋的观赏性和舒适性,是大部分购房者最为关心的环节。近些年来,随着人口红利优势的消失,我国人口结构发生了变化,老龄化问题加重,从事建筑业的劳动力资源日益萎缩,劳动力成本升高。建筑业是一种劳动密集型产业,需要大量施工人员参与作业,其复杂混乱的工作环境和粉尘、噪音等污染容易损害现场工作人员的身体健康,作业时稍有不慎甚至会发生安全事故,造成生命财产损失。
2、然而,我国传统建筑业在资源利用、管理模式等方面存在着严重浪费和管理混乱等,由于信息化和智能化程度不高,严重依赖于工人的技术水平和熟悉程度,造成了传统建筑业施工质量高低不齐,工期长,利润低等问题。
3、使用建筑机器人进行施工作业,可以有效避免上述问题。目前,建筑机器人的发展还处于初级阶段,相对于已经广泛使用的工业机器人和服务型机器人,其生产规模和智能化程度都无法满足我国庞大的建筑行业需求。现有的建筑机器人大多自动化程度不高,作业流程不清晰,不规范,在运行过程中还需要人工辅助,机器人降低成本和提高施工效率的优势并没有显现出来。此外,机器人在控制方面也有着不流畅,各部件配合生硬等问题。
4、由上可知,如何提高控制机器人喷涂的工作质量仍有待解决。
技术实现思路
1、本技术各提供了一种机器人喷涂的控制方法、装置、电子设备及存储介质,可以解决相关技术中存在的控制机器人喷涂的工作质量不高的问题。所述技术方案如下:
2、根据本技术的一个方面,一种机器人喷涂的控制方法,包括:
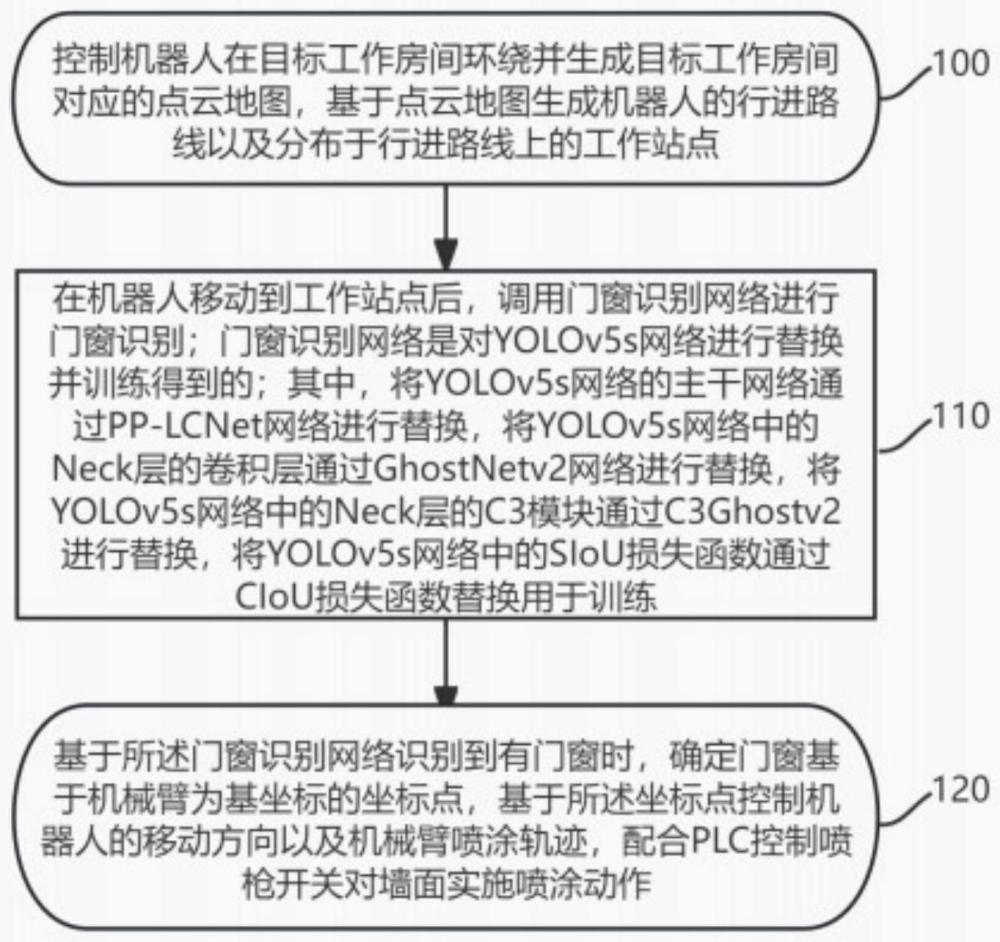
3、控制机器人在目标工作房间环绕并生成所述目标工作房间对应的点云地图,基于所述点云地图生成机器人的行进路线以及分布于所述行进路线上的工作站点;
4、在机器人移动到工作站点后,调用门窗识别网络进行门窗识别;所述门窗识别网络是对yolov5s网络进行替换并训练得到的;其中,将yolov5s网络的主干网络通过pp-lcnet网络进行替换,将yolov5s网络中的neck层的卷积层通过ghostnetv2网络进行替换,将yolov5s网络中的neck层的c3模块通过c3ghostv2进行替换,将yolov5s网络中的siou损失函数通过ciou损失函数替换用于训练;
5、基于所述门窗识别网络识别到有门窗时,确定门窗基于机器人的机械臂为基坐标的坐标点,基于所述坐标点控制机器人的移动方向以及机械臂的喷涂轨迹,对墙面实施喷涂动作
6、根据本技术的一个方面,一种机器人喷涂的控制装置,包括:
7、点云地图生成模块,控制机器人在目标工作房间环绕并用于生成所述目标工作房间对应的点云地图,基于所述点云地图生成机器人的行进路线以及分布于所述行进路线上的工作站点;
8、门窗识别模型获取模块,在机器人移动到工作站点后,用于调用门窗识别网络进行门窗识别;所述门窗识别网络是对yolov5s网络进行替换并训练得到的;其中,将yolov5s网络的主干网络通过pp-lcnet网络进行替换,将yolov5s网络中的neck层的卷积层通过ghostnetv2网络进行替换,将yolov5s网络中的neck层的c3模块通过c3ghostv2进行替换,将yolov5s网络中的siou损失函数通过ciou损失函数替换用于训练;
9、喷涂控制模块,基于所述门窗识别网络识别到有门窗时,确定门窗基于机器人的机械臂为基坐标的坐标点,基于所述坐标点控制机器人的移动方向以及机械臂的喷涂轨迹,用于对墙面实施喷涂动作。
10、在一示例性实施例中,所述装置还包括但不限于:
11、删除模块,用于将所述pp-lcnet网络中的图像分类模块删除,将pp-lcnet网络与原yolov5s网络中的网络特征融合部分连接,其中,图像分类模块包括一个全局平均池化层和两个全连接层。
12、在一示例性实施例中,所述装置还包括但不限于:
13、c3替换模块,用于将c3模块中的瓶颈部分替换为n个ghostv2瓶颈模块。
14、在一示例性实施例中,所述装置还包括但不限于:
15、嵌入模块,用于将transformer编码器模块嵌入到c3模块中,获取对应的c3tr模块。
16、添加模块,用于将所述c3tr模块添加到pp-lcnet网络的末端。
17、在一示例性实施例中,所述装置还包括但不限于:
18、转换关系调取模块,用于调取相机坐标系与图像坐标系的转换关系、像素坐标系与图像坐标系的转换关系、相机坐标系与世界坐标系的转换关系;
19、变换矩阵确定模块,用于确定机器人机械臂与深度相机之间的坐标变换矩阵;
20、门窗坐标获取模块,用于基于深度相机获取门窗在相机坐标系的门窗坐标;
21、现实坐标确定模块,基于所述门窗坐标与坐标变换矩阵用于确定门窗以机器人的机械臂为基坐标的现实坐标信息。
22、在一示例性实施例中,所述装置还包括但不限于:
23、区域确定模块,用于基于所述现实坐标信息确定墙面上的不可喷涂区域与可喷涂区域;
24、判断机器人的机械臂是否处于不可喷涂区域,若是,则控制机器人的机械臂与升降台同时上升至墙面的可喷涂区域,并控制机器人进行喷涂;否则控制机器人直接进行喷涂,
25、在一示例性实施例中,所述装置还包括但不限于:
26、判断是否完成所有工作站点的喷涂工作,若是完成,则控制机械臂回归初始位置,并控制机器人回到初始工作站点;否则基于所述行进路线控制机器人移动到下一个工作站点。
27、根据本技术的一个方面,一种电子设备,包括至少一个处理器以及至少一个存储器,其中,所述存储器上存储有计算机可读指令;所述计算机可读指令被一个或多个所述处理器执行,使得电子设备实现如上所述的机器人喷涂的控制方法。
28、根据本技术的一个方面,一种存储介质,其上存储有计算机可读指令,所述计算机可读指令被一个或多个处理器执行,以实现如上所述的机器人喷涂的控制方法。
29、根据本技术的一个方面,一种计算机程序产品,计算机程序产品包括计算机可读指令,计算机可读指令存储在存储介质中,电子设备的一个或多个处理器从存储介质读取计算机可读指令,加载并执行该计算机可读指令,使得电子设备实现如上所述的机器人喷涂的控制方法。
30、本技术提供的技术方案带来的有益效果是:在进行目标工作房间内的门窗识别时,通过将yolov5s网络的内部结构进行替换,一方面可以大大减少模型的参数量和计算量,加快了网络的推理速度,并在末端卷积层添加se注意力模块以增强对目标特征的获取,使得模型可以在轻量化的基础上仍保持着较高的检测精度;ghostnetv2模块具有动态校准与捕捉长距离空间信息的能力,能够在不损失检测精度的情况下,大幅度减小模型的参数量与计算量;通过构造的c3tr模块,将c3tr模块添加到改进后的主干网络末端,可以在几乎不增加存储成本的基础上帮助模型捕获全局空间关系,增强其特征提取能力,有助于模型更好的定位和识别窗户区域,减小复杂环境对算法准确性的影响;通过上述过程,可以精准快速地识别到墙面上的门窗,从而提高对于机器人在喷涂过程中的控制,另外通过精准识别到门窗位置,同时可以在行进路线上的全部工作站点的基础上进一步优化机器人在喷涂墙面的路线,从而在实现精准快速控制机器人的前提下,还可以对于规划机器人更优的喷涂路线。
本文地址:https://www.jishuxx.com/zhuanli/20240617/51377.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表