用于在牵引车与挂车之间构成能摆动的连接的方法、状态获知组件和车辆与流程
- 国知局
- 2024-08-02 16:33:53
本发明涉及用于经由挂车耦联器在牵引车与挂车之间构成能摆动的连接的方法、状态获知组件、以及车辆,尤其是商用车辆。
背景技术:
1、如果挂车要经由挂车耦联器与牵引车耦接,即与牵引车以能摆动的方式连接,则须对挂车耦联器的准确锁定进行查验,即查验挂车耦联器的锁定状态是否也实际存在。现有的系统利用摄像头通过如下方式来做到这一点,即,根据所拍摄到的图像来直接确认所形成的连接是否存在。此外,还已知有位置传感器或锁定传感器,利用它们来查验各自的锁定机构是否闭锁。
2、在这种耦接过程中,尤其是在全挂车中,可能会出现牵引挂钩口并没有经由耦联栓被正确锁闭,并且牵引杆上的扣眼因此无法以能摆动的方式被容纳。造成这种情况的原因可能是,车辆没有100%地在全挂车正前方行驶,牵引挂钩口的高度不合适,或者牵引挂钩口中的磨损太严重。因此,牵引挂钩口的耦联栓由于所出现的张力而无法正确闭锁,并且牵引挂钩口的控制销也无法卡入。同样,在具有鞍式耦联器的半挂车中也会出现此类问题或这种张力,其中,鞍板的闭锁杆相应地例如由于所出现的张力而无法准确卡入。
3、因此,在这两种情况下,挂车耦联器都是未正确闭锁的,这就带来了相当大的风险,尤其是在全自动化的车辆中,在其中,未发生通过驾驶员进行的附加的人工查验,或者驾驶员遗漏了这样的查验步骤。
4、为此,由现有技术根据us20200361397 a1已知的是,借助摄像头、激光雷达传感器、雷达传感器或超声波传感器来获知在针对乘用车辆的情况下挂车的准确耦接。在乘用车辆中,各自的传感器件在此可以如所述那样对挂车耦联器的耦联元件进行检测。
5、在de 10 2020 103 099 a1和de 10 2020 102 667 a1中分别描述了耦接辅助系统,在其中,摄像头对准耦联球体,以便控制牵引车与挂车之间的接近过程。在此,确定车辆行驶路线,并随后使车辆沿该路线行进。在de 10 2014 003 953 a1中也描述了用于将挂车与牵引车耦联起来的辅助系统,其中,摄像头被用于获知在倒退行驶时挂车的牵引杆上的扣眼的位置。然后据此获知牵引车接近挂车所沿的轨迹,其中,并未检查挂车耦联器是否处于锁定状态。
6、在de 10 2019 007 662 a1中还描述了如何将牵引车和挂车设立到正确的高度,其中,为此动用摄像头的、激光雷达传感器的、雷达传感器的或超声波传感器的传感器信号。在de 10 2018 122 224 a1中描述了用于将牵引车和挂车耦联起来的监控单元,其中,为此监控车辆运动。为此,由传感器装置对牵引车或挂车的运动信息进行评估。然而,没有对耦联是否准确完成进行查验。
7、在ep 1 580 043 b1中还描述了,在全挂车钩挂到牵引车上时,借助单个的传感器装置对牵引挂钩口进行监控,通过该传感器装置能生成发信号告知挂车的机械联接状态的信号。如果不存在准确联接,则挂入牵引车和/或挂车的制动器。在ep 0 794 110 b1、ep 3297 896 a1和de 60 207 502 t2中还描述了经由传感器针对鞍板进行锁定指示,该传感器测量锁定机构何时处于闭锁位置中。在de 10 2020 115 065 a1中,进行了对在挂车耦联器上的传感器销的定位的获知,以便获知耦联状态。
8、在de 10 2004 029 129 a1中还描述了摄像头的图像传感器,该图像传感器对与挂车耦联器相配属的闭锁元件的运行进行监控。如果闭锁元件指明挂车耦联器已锁定,则使牵引车辆减速。如果使用到具有用于探测挂车耦联器的打开状态的传感器的挂车耦联器,那么当根据该传感器获知锁定状态时,也可以使牵引车减速。在ep 3 122 618 b1中也描述了对锁定系统的监控,其中,在识别到不恰当的耦联时,车辆被减速,这样车辆就不会在耦联器打开的状态下驶离。
9、在de 20 2019 104 576 u1中也描述了如何使车辆能够在挂车前方准确地行驶。在de 10 2018 117 584 a1中还示出了一种用于挂车的供应装置的自动耦接系统,即用于传输压缩空气和能量。此外,例如由de 34 37 690a1还已知了用于驾驶舱的锁定指示器。
10、因此,根据所述方法,即使确认了不恰当的耦联或挂车耦联器的解锁状态,至多也就是引发制动,以便不造成损坏,并提高各自状况下的安全性。在现有技术中,没有设置其他的对未准确锁定挂车耦联器做出自动化的反应。
技术实现思路
1、本发明的任务是说明一种方法和一种状态获知组件,利用它们可以依赖于所获知的联接状态自动化地在牵引车与挂车之间构成能摆动的连接。该任务还在于,提供一种车辆。
2、该任务通过根据独立权利要求的方法、状态获知组件和车辆来解决。从属权利要求说明了优选的改进方案。
3、因此,根据本发明,设置有一种用于借助挂车耦联器在牵引车与挂车之间构成能摆动的连接的方法,其中,在挂车耦联器的锁定状态下,在牵引车上的牵引车侧的耦联元件与挂车上的挂车侧的耦联元件之间构成了能摆动的连接该方法至少具有以下步骤:
4、-根据可以从中推断出/推导出联接状态或以某种方式与联接状态相关联的至少一个状态信息来确认挂车耦联器的联接状态,其中,在牵引车接近挂车后(也就是说完成实际的接近过程并且耦联元件优选已经碰触或完成碰触)获知联接状态,从而联接状态表明:在实际的接近和耦接过程之后是构成了还是没有构成能摆动的连接,并且
5、-在牵引车与挂车之间引起不是接近过程的组成部分而是在耦接过程的范围内的修正运动或修正性的相对运动,从而使得挂车和牵引车相对彼此运动,其中,如果根据至少一个状态信息无法确认或至少无法可信地确认挂车耦联器的锁定状态是否存在,则引起修正运动。
6、如果与预料相反,挂车耦联器在接近过程后没有进入到锁定状态,则耦联元件相互间的可能存在的意外定位都可以通过修正性的相对运动或修正运动被有利地取消或消除。在此,如果将挂车耦联器设立到锁定状态被阻止或无法实现,例如当牵引车侧的耦联元件和挂车侧的耦联元件受张力或相互间未准确取向,则例如假定:根据至少一个状态信息无法确认或无法可信地确认挂车耦联器的锁定状态是否存在。在这种情况下,根据探测类型可以识别出解锁状态,或者无法可信地确认实际存在哪个联接状态。然而,这种张力或错误的定位可以通过修正运动以简单且可靠的方式被取消,从而仍可以自行设立锁定状态,而无需执行耗费的查验。
7、在此优选足够的是,通过如下方式自动化地引起修正运动,即,使牵引车和/或挂车至少短暂地发生运动。因此,通过如下方式就已经可以消除张力,即,使两个耦联元件短暂地相对彼此运动,从而例如耦联栓或耦联爪仍可以卡入到各自的耦联元件中(如果之前由于因张力而无法实现这一点的话)。因此,通过使牵引车和/或挂车短暂运动就能实现简单地修正尚未被进入的锁定状态。在此的出发点在于仅需要导致两个车辆部分(牵引车和挂车)或耦联元件之间的修正性的相对运动,这可以要么通过挂车的运动要么通过牵引车的运动来实现,或者通过这两者来实现。
8、在此可以优选设置的是,通过如下方式引起修正运动,即,自动化地驱控布置在牵引车中的牵引车功能单元和/或布置在挂车中的挂车功能单元,例如通过根据本发明的状态获知单元或依赖于由状态获知单元输出的控制信号来驱控,其中,牵引车功能单元由从以下组中选定的至少一个单元形成,该组包括:
9、牵引车驱动系统、具有牵引车离合器的牵引车离合器传动单元(其优选可以是牵引车驱动系统的组成部分)、具有至少一个牵引车制动器件(例如行车制动器和/或驻车制动器和/或持续制动器)的牵引车制动系统、牵引车水平调节系统、用于对能转向的牵引车车桥进行转向的牵引车转向系统、用于升高或降低牵引车升降桥的牵引车升降桥控制部,并且
10、其中,挂车功能单元由从以下组中选定的至少一个单元形成,该组包括:
11、挂车驱动系统、具有挂车离合器的挂车离合器传动装置(其优选是挂车驱动系统的组成部分)、具有至少一个挂车制动器件(例如行车制动器和/或驻车制动器和/或持续制动器)的挂车制动系统、挂车水平调节系统、用于对能转向的挂车车桥进行转向的挂车转向系统、用于升高或降低挂车升降桥的挂车升降桥控制部。
12、因此,能使用一系列功能单元,它们可以影响牵引车或挂车的运动,并且利用它们可以引起修正运动,以便在理想情况下仍可以设立或形成锁定状态。
13、在此,根据一个实施方式设置的是,通过如下方式引起修正运动,即,利用急动控制信号来驱控牵引车驱动系统和/或挂车驱动系统,使得牵引车和/或挂车急动式地被驱动,以用于引发急动,即引发牵引车和/或挂车的短暂、急动式地向前和向后移动。这就利用简单的手段引发两个车辆部分之间的相对运动或修正运动,由此可以释放或消除耦联元件的张力或错误位置。
14、为了实现这一点,优选可以设置的是,驱控牵引车离合器传动单元和/或挂车离合器传动单元,使得在相应的车辆部分中挂入最低前进挡或最低后退挡,并且同时将各自的离合器传动单元的牵引车离合器和/或挂车离合器调节到中间位置中,使得各自的离合器可以在最低的前进挡或最低的后退挡中滑磨。这是一种简单的可行方案,以便在当前状况下例如当存在耦联元件的张力或错误位置时自动化地产生急动式的运动或急动并以该方式形成挂车耦联器的锁定状态。
15、此外,在此优选设置的是,在存在急动控制信号时也驱控牵引车制动系统和/或挂车制动系统,以便对牵引车和/或挂车进行制动,使得对牵引车和/或挂车的急动式的驱动受到限制。因此,在急动的同时也对车辆进行制动,从而使牵引车或挂车在短暂的向前和向后移动时不会过度运动,并由此可以避免因过度接近所造成的损坏。然而,原则上也能在没有这种制动的情况下进行这种急动,其中,各自的离合器只会短暂“接合”,然后立即又受到操纵,结果是使牵引车或挂车随即又保持静止。
16、根据另外的实施方式设置的是,通过如下方式引起修正运动,即,利用释放控制信号来驱控牵引车制动系统和/或挂车制动系统,使得释放牵引车制动器件和/或挂车制动器件,以用于在必要时使牵引车和/或挂车进行与倾斜度相关的运动。因此,如果车辆停驻并确认不存在锁定状态,则释放至少一个车辆部分上的制动器件。如果各自的车辆部分处于缓坡上,或者如果各自的车辆部分在停驻时使用了轮挡,或者如果两个耦联元件之间作用有张力,则这种对制动器件的释放将引发起步,并自动发生所期望的修正运动,由此能够释放或消除耦联元件的张力或错误位置。
17、此外,在此优选设置的是,利用释放控制信号仅驱控牵引车制动系统,以便释放牵引车制动器件,而在挂车制动系统中的挂车制动器件被张紧或保持张紧,或者
18、利用释放控制信号仅驱控挂车制动系统,以便释放挂车制动器件,而在牵引车制动系统中的牵引车制动器件被张紧或保持张紧。
19、以该方式,只有一个车辆部分运动,而另一个车辆部分保持静止,由此可以以有效的方式引起修正性的相对运动或修正运动。
20、此外,在此可以优选设置的是,交替地使各个挂车制动器件和/或各个牵引车制动器件一次或多次释放并再次张紧。以该方式,仅引起微弱的但对于释放张力或错误位置而言已经足够了的修正运动。这种暂时释放还提高了安全性。
21、根据另外的实施方式设置的是,通过如下方式引起修正运动,即,利用高度控制信号来驱控牵引车水平调节系统和/或挂车水平调节系统,使得牵引车侧的耦联元件与挂车侧的耦联元件之间的高度差发生变化。以该方式,也可以以简单的方式释放或消除耦联元件之间的张力或错误位置。
22、根据另外的实施方式,高度差的变化或者修正运动也可以通过如下方式来引起,即,利用升降桥控制信号来驱控牵引车升降桥控制部和/或挂车升降桥控制部,使得牵引车升降桥和/或挂车升降桥升高或降低,并由此改变牵引车侧的耦联元件与挂车侧的耦联元件之间的高度差。通过这种对各自的升降桥的升高或降低也导致牵引车和/或挂车的车身高度发生变化,这是因为其余的车桥将较大程度地受载或较少程度地受载,结果是牵引车或挂车会下沉或抬升。因此,以该方式也可以引起修正运动。
23、根据另外的实施方式设置的是,通过如下方式引起修正运动,即,利用驱动控制信号来驱控牵引车驱动系统和/或挂车驱动系统,使得牵引车运动离开挂车,以便使两者相互间重新取向。因此,如果存在张力或错误位置,也可以使两个车辆部分略微运动离开彼此,使得可以重新进行受控的接近过程,在此受控的接近过程中在理想情况下不再出现耦联元件的张力或错误位置。例如,如果根据其他实施方式的修正运动还是没有导致构成锁定状态,即还是可能存在无法以简单方式在不重新取向的情况下消除的张力或错误位置,则可以使用本实施方式。
24、根据另外的实施方式设置的是,通过如下方式引起修正运动,即,利用转向控制信号来驱控牵引车转向系统和/或挂车转向系统,使得相应的能转向的车桥偏转,并使静止的牵引车和/或静止的挂车因这种转向运动而略微运动。因此,有利地充分利用了在任意转向运动中各自的车辆部分也略微运动并由此可以引起修正运动。此外,这方面的优点还在于,牵引车或挂车本身不运动到因与其他车辆或人员碰触而可能产生危险的程度。在此,优选可以设置的是,牵引车上的能转向的牵引车车桥与能转向的挂车车桥相反地偏转,由此得到了相反的进而是最大的修正运动。
25、此外,优选设置的是,在引起修正运动后,根据至少一个状态信息来重新确认挂车耦联器是否处于锁定状态。因此,重新查验修正运动是否实际上且如预期的那样导致了形成锁定状态。于是,还可以优选设置的是,如果在多次(例如三次)分别相互独立地引起修正运动后,根据至少一个状态信息确认挂车耦联器仍未处于锁定状态,则驱控牵引车驱动系统和/或挂车驱动系统,使牵引车运动离开挂车或变向,以便使两者相互间重新取向。
26、上述用于引起修正运动的实施方案在此可以相互补充或替选地应用,以便可以对耦联元件的不同的错误位置或张力做出反应。各个张力或错误位置有可能仅通过不同的修正运动中的一个修正运动就可以被消除,从而可能依次应用不同的修正运动,或者如果可能的话,彼此并行地应用可以是有意义的。
27、此外,优选设置的是,在牵引车接近挂车后,根据至少两个彼此独立地获知的状态信息(例如联接信息和定位信息)来确认挂车耦联器的联接状态,其中,如果彼此独立地获知的状态信息中的至少一个状态信息表明不存在锁定状态,则无法确认或无法可信地确认挂车耦联器的锁定状态是否存在。因此,要么如果所有状态信息都指明存在解锁状态或不存在锁定状态,则可以明确获知这种情况,要么如果一个状态信息指明存在解锁状态,而另一状态信息指明存在锁定状态,则无法可信地确认锁定状态是否实际存在。以该方式,可以简单地确认耦联元件中是否可能存在张力或错误位置,这是因为本来假定在牵引车接近挂车后就必须存在锁定状态,但这无法通过状态信息来证实。
28、在此,优选设置的是,挂车耦联器的联接状态至少通过以下步骤来确认:
29、-获知联接信息,其中,联接信息依赖于
30、--挂车耦联器的锁定机构的位置
31、和/或
32、--牵引车急动度,和/或
33、--挂车急动度
34、来表明挂车耦联器是否可能处于锁定状态;
35、-获知定位信息,其中,定位信息依赖于基于波的传感器装置的传感器信号来表明挂车耦联器是否可能处于锁定状态;并且
36、-依赖于联接信息和定位信息地获知联接结果,其中,联接结果表明经由挂车耦联器在牵引车与挂车之间是构成了还是没有构成能摆动的连接。
37、因此有利的是,动用了至少两个彼此独立的且作用也不同的测量原理,以便验证挂车耦联器的联接状态。由此确保不会由于错误地获知的联接信息而输出错误的联接状态,这是因为只有当定位信息也指明相同的联接状态时,才能够具有高可靠性地假定正确的联接结果。因此,状态信息,即联接信息和定位信息,可以相互间检查可信度,并且然后才输出最终的联接结果,或者针对上述根据本发明的方法可以得出锁定状态不存在或其存在是不可信的结论。
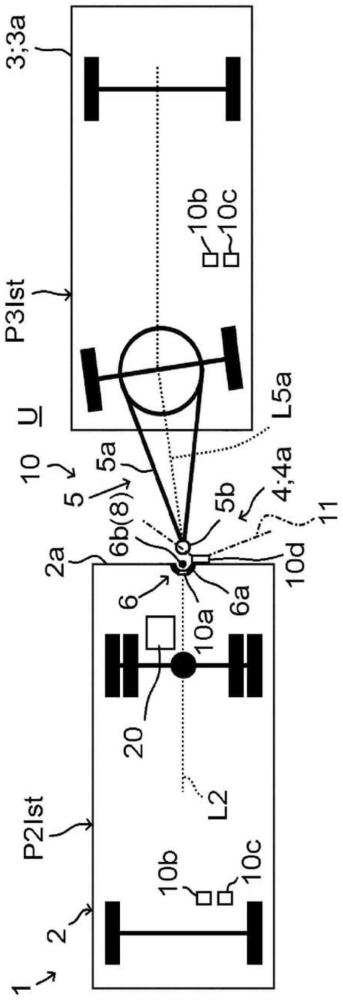
38、为此,优选动用基于波的传感器装置,即对在可见和不可见的波长范围内的波或辐射进行评估的传感器装置,例如通过摄像头对可见光、在激光雷达传感器的情况下对激光辐射、在雷达传感器的情况下对雷达辐射和在超声波传感器的情况下对超声波辐射进行评估。所有这些基于波的传感器装置都允许获知与在周围环境中参与能摆动的连接的对象有关的姿态信息。
39、此外,优选设置的是,获知定位信息具有以下步骤:
40、-通过基于波的传感器装置检测周围环境中的至少一个对象并输出传感器信号,其中,基于波的传感器装置布置在牵引车或挂车上;
41、-获知所检测到的对象的姿态信息,尤其是获知所检测到的对象相对于基于波的传感器装置或相对于布置有基于波的传感器装置的牵引车或挂车的实际定位和/或实际取向,
42、其中,至少一个检测到的对象是牵引车和/或挂车,或者是周围环境中的与之相连的参与构成能摆动的连接的对象,例如牵引车侧的耦联元件和/或挂车侧的耦联元件。
43、为此,基于波的传感器装置例如可以是车辆中现有的驾驶员辅助系统(如倒车辅助)的组成部分,从而无需为了通过获知定位信息对能摆动的连接进行可信性监控而在车辆中安装另外的传感器件。在此,尤其设置的是,牵引车和/或挂车上的耦联元件并不强制地位于基于波的传感器装置的检测范围内,这是因为实际定位和/或实际取向可以通过几何上的观察例如根据牵引车或挂车的实际定位和/或实际取向来重建。因此,一般可以设置的是,如果周围环境中的参与构成能摆动的连接的对象无法或无法完全被基于波的传感器装置检测到,则该对象的姿态信息可以根据与周围环境中与之相连的被检测到的对象有关的姿态信息推导出来。因此,就不用在挂车耦联器的区域内明确设置可以完全辨别出挂车耦联器或所有耦联元件的基于波的传感器装置。
44、此外可以设置的是,获知定位信息还具有以下步骤:
45、-依赖于以下因素来获知定位信息,即
46、--如果牵引车(或挂车)运动,被检测到的对象的所获知的实际定位和/或所获知的实际取向和/或所获知的姿态信息是否发生变化以及在多大程度上发生变化,
47、和/或与之作用相同地,
48、--所获知的实际定位和/或所获知的实际取向和/或所获知的姿态信息是否造成牵引车与挂车之间的相对运动,
49、其中,如果当牵引车运动时被检测到的对象的所获知的实际定位和/或所获知的实际取向和/或所获知的姿态信息没有发生变化,和/或牵引车与挂车之间不存在相对运动,则定位信息优选表明挂车耦联器可能处于锁定状态。有利的是,因此也可以根据基于波的传感器装置的传感器信号得出牵引车是否仍可以相对挂车运动的结论,这可以被考虑用于验证联接信息,即该联接信息被证实或并未被证实。
50、此外,优选设置的是,如果根据挂车耦联器的锁定机构的运动和/或根据用于操纵锁定机构的电操纵机构的控制信号得出锁定机构处于闭锁位置中,则联接信息表明挂车耦联器可能处于锁定状态。因此,可以以简单的方式从位于其中一个耦联元件上的联接传感器或锁定传感器推导出有关联接状态的信息。
51、此外,优选设置的是,用于获知联接信息的牵引车急动度和/或挂车急动度经由
52、-牵引车和/或挂车上的速度传感器,和/或
53、-牵引车和/或挂车上的加速度传感器
54、来获知。例如,这种速度传感器或加速度传感器可以是车轮转速传感器,优选是检测各自的车轮处的转速的主动式的车轮转速传感器,其中,根据转速可以推断出速度或加速度。然而,也能想到其他传感器。因此,可以动用现有的传感器,以便推断出急动度,该急动度同样可以指明是否已经发生了耦接。通常,在耦联元件碰触时得到在牵引车或挂车上的速度或加速度的突然变化。因此设置的是,如果牵引车急动度和/或挂车急动度指明挂车侧的耦联元件已经碰触到牵引车侧的耦联元件,尤其是牵引车急动度和/或挂车急动度达到或超过急动度边界值,则联接信息就表明挂车耦联器可能处于锁定状态。
55、此外,优选设置的是,联接信息和定位信息依次或相互并行地获知。因此,可以根据应用情况而定地灵活决定按哪种顺序来获知信息并进行评估。在此,可以优选设置的是,只有当联接信息表明挂车耦联器可能处于锁定状态时,才对定位信息进行获知,或者反过来。有利的是,这可以通过如下方式来实现,即,首先仅针对其中一个可行方案进行数据采集和评估,并接下来才进行对数据的进一步评估以用于可信度检查或验证。
56、此外,优选设置的是,如果联接信息和定位信息都表明挂车耦联器可能处于锁定状态,则补充地还获知牵引车急动度和/或挂车急动度是否达到或超过规定的急动度阈值,尤其是在牵引车发生运动后的时间偏移之内,并且如果达到规定的急动度阈值,则该联接结果表明牵引车与挂车之间构成了能摆动的连接。因此,即使在联接状态得到验证后,也可以再次获知挂车是否在牵引车起步后由于耦联器中的游隙而在时间上偏移地被牵引带动。
57、此外,优选设置的是,如果联接信息和定位信息都表明挂车耦联器可能处于锁定状态,则联接结果表明牵引车与挂车之间构成了能摆动的连接。
58、此外,根据本发明,还设置了一种用于尤其是根据本发明的方法经由挂车耦联器在牵引车与挂车之间构成能摆动的连接的状态获知组件,状态获知组件具有状态获知单元,其中,状态获知单元被构造成,
59、-在牵引车接近挂车后,根据至少一个状态信息确认挂车耦联器的联接状态,并且
60、-产生和输出控制信号,以便引起修正运动,从而使得挂车和牵引车相对彼此运动,其中,如果根据至少一个状态信息无法确认或无法可信地确认是否存在挂车耦联器的锁定状态,则可以引起修正运动。
61、根据本发明,还设置了一种车辆,尤其是商用车辆,该车辆由牵引车和挂车构成,其中,当挂车耦联器的锁定机构被带引到闭锁位置中时,可以经由挂车耦联器在牵引车上的牵引车侧的耦联元件和挂车上的挂车侧的耦联元件之间构成能摆动的连接,其中,车辆还具有根据本发明的状态获知组件,以用于经由挂车耦联器在牵引车与挂车之间构成能摆动的连接。挂车耦联器在此可以优选
62、-被实施为栓式耦联器,在其中,作为挂车侧的耦联元件的在牵引杆上的扣眼可以经由作为锁定机构的耦联栓保持在作为牵引车侧的耦联元件的牵引挂钩口中,以便构成能摆动的连接,或
63、-被实施为鞍式耦联器,在其中,作为挂车侧的耦联元件的鞍座主销可以经由作为锁定机构的耦联爪保持在作为牵引车侧的耦联元件的鞍板上,以便构成能摆动的连接。因此可以针对不同的耦联器类型灵活使用。
本文地址:https://www.jishuxx.com/zhuanli/20240718/251297.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表