一种轮履复合行走机器人的制作方法
- 国知局
- 2024-08-01 07:57:36
本发明涉及行走机器人,具体为一种轮履复合行走机器人。
背景技术:
1、用于火灾、矿难、核泄漏等危险作业的小型地面移动机器人以其体积小、成本低、生存能力强、运动灵活等特点成为移动机器人研究领域的又一热点,移动机器人最基本的行走方式有轮式、履带式及腿式三种,其中轮式结构运行平稳、高速高效,然而其越障能力、适应复杂地形的能力却非常有限;履带式行走装置接地比压小,能够适应沙土、泥泞等松软地形,但同时也存在转弯性较差、速度及效率较低等缺点;腿式结构具有越障能力强、适应性好的优点,但是其行进速度低、能耗高。
2、将轮式、履式、腿式三种运动模式的优势集于一身,实现结构简单、体积更小、运动更加稳定、能在轮式模式和履带式模式之间的自动切换和自动避障的目的。
3、轮式机器人在面对多变的地形时容易导致机器人重心不稳定,而履带式机器人在本身重量上也相对较重,在攀爬楼梯时对电机的要求非常高,且行走的速度相对较慢,而现有的轮履复合行走机器人进行轮履切换时,由于需要改变机器人的支撑点,使得机器人在切换过程中极其不稳定,无法对物品进行运输,同时自身也容易发生倾斜翻倒,并且机器人在移动过程中减速或加速时,在移动向前的惯性下,机器人也会因为自身较重而极易翻倒,造成损坏。
技术实现思路
1、基于此,本发明的目的是提供一种轮履复合行走机器人,以解决上述背景中提出的技术问题。
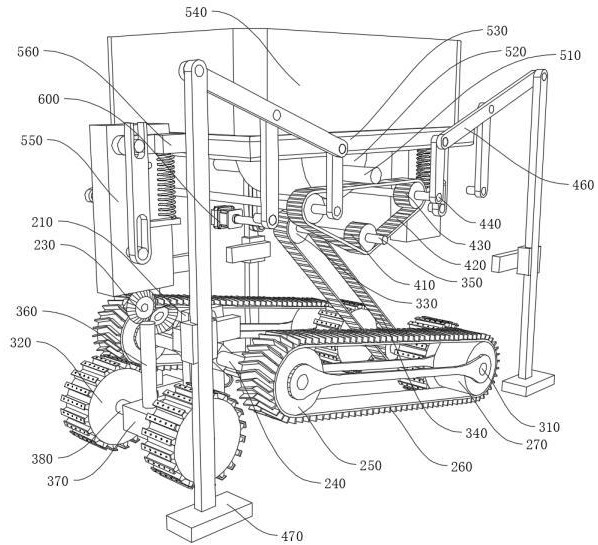
2、为实现上述目的,本发明提供如下技术方案:一种轮履复合行走机器人,包括支撑架,所述支撑架的内壁固定连接有第一移动机构,所述第一移动机构的内壁固定连接有第二移动机构,所述第二移动机构的外壁固定连接有第三移动机构,所述第三移动机构的一侧转动连接有缓冲机构;所述第一移动机构包括有与支撑架固定连接的定位板,所述定位板上开设有弧形槽,所述弧形槽内滑动连接有调节组件,所述调节组件的一侧转动连接有短轴,所述短轴的外壁转动连接有前履带轮,所述前履带轮啮合有移动履带,所述移动履带啮合有后履带轮,所述短轴、前履带轮和移动履带均设置有两组,所述短轴、前履带轮和移动履带对称设置在定位板的两侧,所述后履带轮的内壁固定连接有第二移动机构。
3、作为本发明的一种优选技术方案,所述调节组件包括有与弧形槽滑动连接的限位块,所述限位块的一侧转动连接有转动块,所述转动块的内壁螺纹连接有螺纹杆,所述螺纹杆的外壁固定连接有第一锥齿轮,所述第一锥齿轮啮合有第二锥齿轮,所述第二锥齿轮的内壁固定连接有调节轴,所述调节轴的外壁转动连接有l形块,所述l形块与螺纹杆之间转动连接,所述转动块设置有两组,两组所述转动块对称设置在限位块的两侧。
4、作为本发明的一种优选技术方案,所述第二移动机构包括有与后履带轮内壁固定连接的长轴,所述长轴的外壁固定连接有车轮,所述车轮设置有四组,所述车轮的外壁固定连接有第一链轮,所述第一链轮的外壁啮合有第一链条,所述第一链轮设置有两组,所述第一链轮的内壁固定连接有第一转轴,所述第一转轴的一端固定连接有电机的输出端,所述第一转轴的外壁固定连接有第三移动机构,所述支撑架的内壁转动连接有方向轴,所述方向轴的底端固定连接有转向块,所述转向块的内壁转动连接有转向轴,所述转向轴与车轮之间固定连接,所述车轮外壁固定连接有减震组件。
5、作为本发明的一种优选技术方案,所述第三移动机构包括有与第一转轴外壁固定连接的第二链轮,所述第二链轮啮合有第二链条,所述第二链条啮合有第三链轮,所述第三链轮的内壁固定连接有第二转轴,所述第二转轴的外壁转动连接有支撑板,所述第二转轴的外壁固定连接有移动组件,所述支撑架上开设有滑槽,所述移动组件的底端固定连接有支撑垫,所述第三链轮、第二转轴、支撑板和滑槽均设置有两组,所述移动组件和支撑垫均设置有四组,所述支撑板的一侧固定连接有缓冲机构。
6、作为本发明的一种优选技术方案,所述移动组件包括有与第二转轴外壁固定连接的第一转动杆,所述第一转动杆的一侧固定连接有第一连接轴,所述第一连接轴的外壁转动连接有第二转动杆,所述第二转动杆的内壁固定连接有第三连接轴,所述第三连接轴的外壁转动连接有支撑杆,所述支撑杆的底端固定连接有支撑垫,所述支撑杆的外壁滑动连接有滑块,所述滑块与滑槽之间滑动连接,所述第二转动杆的内壁固定连接有第二连接轴,所述第二连接轴的一端转动连接有第三连接轴,所述第三连接轴的内壁转动连接有定位轴,所述定位轴与支撑板之间固定连接。
7、作为本发明的一种优选技术方案,所述缓冲机构包括有与支撑板的一侧固定连接的支撑轴,所述支撑轴的外壁固定连接有支撑块,所述支撑块的顶端固定连接有底板,所述底板的顶端固定连接有储物箱,所述储物箱的一侧固定连接有缓冲组件,所述缓冲组件的一端固定连接有固定板,所述固定板的一侧固定连接有限位柱,所述固定板、缓冲组件和限位柱均设置有两组,两组所述固定板、缓冲组件和限位柱对称设置在底板的两侧,所述固定板的底端固定连接有支撑架。
8、作为本发明的一种优选技术方案,所述缓冲组件包括有与底板的一侧固定连接的连接块,所述连接块的底端固定连接有复位弹簧,所述复位弹簧的底端固定连接有连接板,所述连接板的一端固定连接有连接杆,所述连接杆上开设有第一限位槽,所述连接杆的顶端开设有第二限位槽,所述第一限位槽的槽内滑动连接有第二限位轴,所述第二限位轴与固定板之间固定连接,所述第二限位槽槽内滑动连接有第一限位轴,所述第一限位轴与连接块之间固定连接。
9、作为本发明的一种优选技术方案,所述减震组件包括有与车轮外壁固定连接的连接条,所述连接条上开设有让位槽,所述让位槽的槽内固定连接有第一弹簧,所述第一弹簧的顶端固定连接有滑杆,所述滑杆与让位槽之间滑动连接,所述滑杆的外壁固定连接有减震块,所述滑杆的外壁套设有第二弹簧,所述第二弹簧的一端与减震块之间固定连接,所述第二弹簧的另一端与连接条之间固定连接,所述让位槽、第一弹簧、滑杆和第二弹簧均设置有多组,所述减震组件设置有多组,多组所述减震组件以车轮的圆心为轴心圆周阵列设置。
10、综上所述,本发明主要具有以下有益效果:
11、本发明通过设置第一移动机构和第二移动机构,可根据实际路况进行移动机构之间的切换,机器人靠第二移动机构轮式进行移动行走,可以更加灵活高速高效的行走,在遇到沙土、泥泞等松软地形时,通过机器人的控制器操控调节轴连接的驱动件启动,从而带动第一移动机构变为新的主移动机构,使得机器人移动的更加稳定;
12、本发明通过设置第三移动机构,作为辅助移动机构,使得切换过程中的机器人移动更加平稳,增强行走机器人的适应性,在机器人移动过程中第三移动机构作为辅助支撑点,使得不管是第一移动机构还是第二移动机构作为机器人移动的主机构,第三移动机构都可以增加移动过程中的稳定性,且不需要额外的动力源;
13、本发明通过设置缓冲机构,机器人的控制器或者需要运输的物品可设置放置在储物箱内,在移动过程中减速或加速时,在移动向前的惯性下机器人容易翻倒,支撑架可在缓冲机构的带动下使得倾斜的储物箱快速复位,对储物箱内的物资进行保护,同时机器人快速切换为平衡状态,使得机器人在移动过程中整体更加稳定平衡。
本文地址:https://www.jishuxx.com/zhuanli/20240722/229658.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表