制动踏板、控制方法、车载控制器、控制系统及车辆与流程
- 国知局
- 2024-10-21 14:24:05
本发明涉及踏板,尤其涉及一种制动踏板、控制方法、车载控制器、控制系统及车辆。
背景技术:
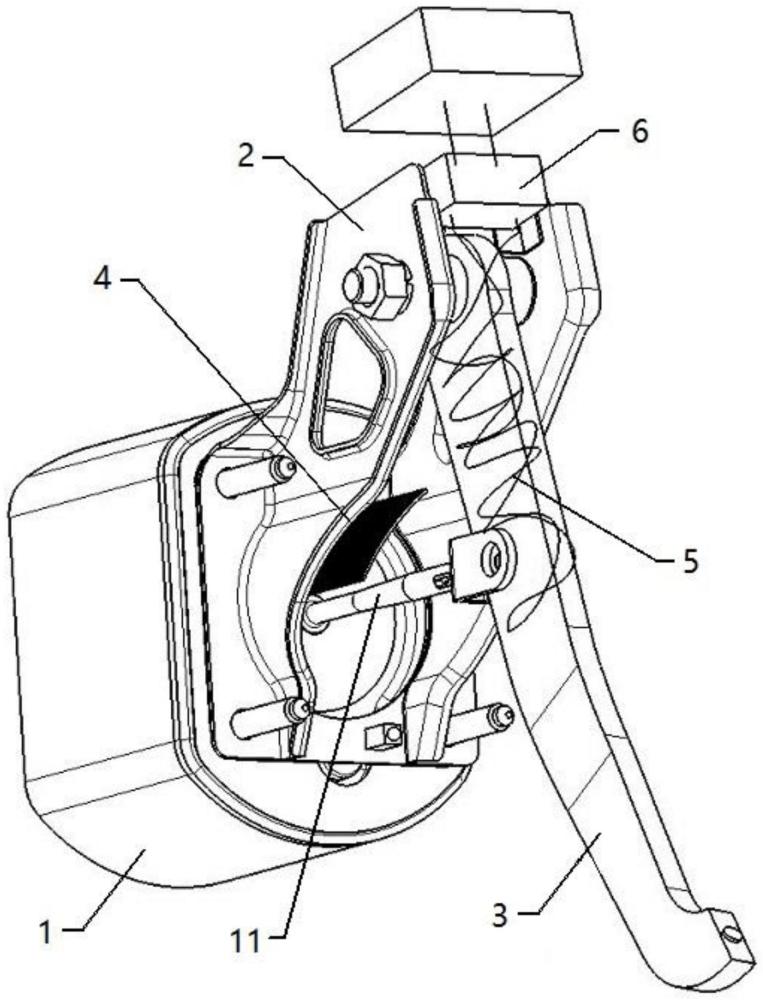
1、当前车辆中,通常采用踏板结构传递制动力,触发制动系统进行制动。目前的制动踏板结构较为简单,由踏板臂和踏板底座构成。踏板臂的一端与底座铰接,另一端连接踏板本体,踏板臂的中段与制动系统中的推杆铰接,通过踩下踏板本体,可以使踏板臂绕着与踏板底座的铰接点旋转,进而推动推杆在制动系统中运动,触发制动效果。当施加在踏板本体的踩踏力消失后,推杆会自动回位,在回位结束时会带动踏板臂撞击限位点,由于推杆和踏板臂在自由回位过程中没有任何缓冲,在撞击限位点时会产生噪音,令人困扰。
技术实现思路
1、本发明实施例提供一种制动踏板、控制方法、车载控制器、控制系统及车辆,以解决推杆和踏板臂在自由回位后,会撞击限位点产生噪音的问题。
2、一种制动踏板,包括踏板底座、踏板臂和踏板本体,所述踏板底座用于与制动系统相连,所述踏板臂的第一端与所述踏板底座铰接,所述踏板臂的第二端与所述踏板本体铰接,所述踏板臂的中段用于与所述制动系统内的推杆铰接,所述制动踏板还包括电磁感应模块;
3、所述电磁感应模块包括磁铁、导电线圈和电源;所述磁铁固定安装在所述踏板底座上;所述导电线圈缠绕在所述踏板臂上,与所述电源电连接,通过电源给导电线圈提供导电电流;所述导电线圈与所述磁铁相对设置。
4、一种制动踏板控制方法,包括:
5、获取制动踏板的当前位移和当前踩踏力;
6、根据所述当前位移和所述当前踩踏力,确定所述制动踏板的当前踏板状态;
7、若所述当前踏板状态为自由回位状态,则获取所述制动踏板上次处于自由回位状态时采集的回位噪声值和第一导电电流;
8、若所述回位噪声值大于预设噪声值,则控制所述电源给所述制动踏板上的导电线圈提供第二导电电流,所述第二导电电流大于第一导电电流。
9、优选地,所述根据所述当前位移和所述当前踩踏力,确定所述制动踏板的当前踏板状态,包括:
10、根据所述当前位移,确定制动踏板的第一踏板状态;
11、若所述制动踏板的第一踏板状态为踏板回位状态,则根据所述当前踩踏力,确定所述制动踏板的当前踏板状态。
12、优选地,所述根据所述当前位移,确定制动踏板的第一踏板状态,包括:
13、将所述当前位移与预设位移增量进行比较;
14、若所述当前位移大于预设位移增量,则确定所述制动踏板的第一踏板状态为踏板踩下状态;
15、若当前位移小于预设位移增量,则确定制动踏板的第一踏板状态为踏板回位状态。
16、优选地,所述若所述制动踏板的第一踏板状态为踏板回位状态,则根据所述当前踩踏力,确定所述制动踏板的当前踏板状态,包括:
17、若所述制动踏板的第一踏板状态为踏板回位状态,则根据所述当前位移,确定当前时刻对应的当前速度;
18、若所述当前速度大于预设速度,则根据所述当前踩踏力,确定所述制动踏板的当前踏板状态。
19、优选地,在所述若所述制动踏板的第一踏板状态为踏板回位状态,则根据所述当前位移,确定当前时刻对应的当前速度之后,所述制动踏板控制方法方法还包括:
20、若所述当前速度不大于所述预设速度,则减小所述制动踏板上的导电线圈的导电电流。
21、优选地,所述若所述制动踏板的第一踏板状态为踏板回位状态,则根据所述当前踩踏力,确定所述制动踏板的当前踏板状态,包括:
22、将所述当前踩踏力与预设踩踏力进行比较;
23、若所述当前踩踏力大于预设踩踏力,则确定所述制动踏板的当前踏板状态为非自由回位状态;
24、若所述当前踩踏力不大于预设踩踏力,则确定所述制动踏板的当前踏板状态为自由回位状态。
25、一种车载控制器,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一项所述的制动踏板控制方法。
26、一种制动踏板控制系统,包括上述的制动踏板、车载控制器、行程传感器、压力传感器和噪声传感器;
27、所述行程传感器设置在所述推杆上,用于采集当前位移;
28、所述压力传感器设置在所述踏板本体上,用于采集当前踩踏力;
29、所述噪声传感器设置在所述踏板底座上,用于采集回位噪声值;
30、所述车载控制器,与所述电源、所述行程传感器、所述压力传感器和所述噪声传感器相连,用于根据所述当前位移、所述当前踩踏力和所述回位噪声值,控制所述电源给所述导电线圈输出导电电流。
31、一种车辆,包括上述的制动踏板控制系统。
32、本发明实施例所提供的制动踏板、控制方法、车载控制器、控制系统及车辆,在推杆及踏板臂自由回位时,车载控制器能够通过检测当前位移和当前踩踏力确定当前踏板本体是否处于自由回位状态,进一步的获取上次自由回位时产生的噪声值,并根据上次自由回位产生的噪声值控制增加踏板臂处缠绕的导电电流,使踏板臂处的导电线圈与踏板底座出的磁铁之间的吸引力增强,从而减小本次踏板臂及推杆自由回位时的速度,减小本次自由回位产生的噪声值,解决了推杆和踏板臂在自由回位后,会撞击限位点产生噪音的问题。
技术特征:1.一种制动踏板,包括踏板底座、踏板臂和踏板本体,所述踏板底座用于与制动系统相连,所述踏板臂的第一端与所述踏板底座铰接,所述踏板臂的第二端与所述踏板本体铰接,所述踏板臂的中段用于与所述制动系统内的推杆铰接,其特征在于,所述制动踏板还包括电磁感应模块;
2.一种制动踏板控制方法,其特征在于,包括:
3.根据权利要求2所述的制动踏板控制方法,其特征在于,所述根据所述当前位移和所述当前踩踏力,确定所述制动踏板的当前踏板状态,包括:
4.根据权利要求3所述的制动踏板控制方法,其特征在于,所述根据所述当前位移,确定制动踏板的第一踏板状态,包括:
5.根据权利要求3所述的制动踏板控制方法,其特征在于,所述若所述制动踏板的第一踏板状态为踏板回位状态,则根据所述当前踩踏力,确定所述制动踏板的当前踏板状态,包括:
6.根据权利要求5所述的制动踏板控制方法,其特征在于,在所述若所述制动踏板的第一踏板状态为踏板回位状态,则根据所述当前位移,确定当前时刻对应的当前速度之后,所述制动踏板控制方法方法还包括:
7.根据权利要求3所述的制动踏板控制方法,其特征在于,所述若所述制动踏板的第一踏板状态为踏板回位状态,则根据所述当前踩踏力,确定所述制动踏板的当前踏板状态,包括:
8.一种车载控制器,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求2-7任一项所述的制动踏板控制方法。
9.一种制动踏板控制系统,其特征在于,包括权利要求1所述的制动踏板、权利要求8所述的车载控制器、行程传感器、压力传感器和噪声传感器;
10.一种车辆,其特征在于,包括权利要求9所述的制动踏板控制系统。
技术总结本发明公开一种制动踏板、控制方法、车载控制器、控制系统及车辆,该制动踏板包括制动系统、踏板底座、踏板臂和踏板本体,还包括电磁感应模块;所述电磁感应模块包括磁铁、导电线圈和电源。该方法包括:获取制动踏板的当前位移和当前踩踏力;根据所述当前位移和所述当前踩踏力,确定所述制动踏板的当前踏板状态;若所述当前踏板状态为自由回位状态,则获取所述制动踏板的回位噪声值;若所述回位噪声值大于预设噪声值,则增大所述制动踏板上的导电线圈的导电电流。该方法可根据采集到的当前位移、当前踩踏力和回位噪声值控制导电线圈的导电电流,进而控制踏板臂的回位速度,防止其自由回位时产生过大噪声。技术研发人员:张灿为,孙建涛,况旭,张伟栋,罗文杰受保护的技术使用者:广州汽车集团股份有限公司技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/317992.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。