车道保持辅助装置和用于辅助车道保持的方法与流程
- 国知局
- 2024-10-15 10:25:18
本发明涉及一种基于物体的车道保持辅助装置,以及一种提供基于物体保持车道的辅助的方法。
背景技术:
1、如今,车辆配备了越来越多的辅助装置,不仅可以支持驾驶员,还可以提高道路安全性。特别是,自动驾驶车辆依靠各种辅助功能来执行各种任务,甚至往往是冗余的。其中一种辅助装置是车道保持系统,可防止意外偏离行车道。
2、然而,传统的车道保持辅助功能仍然容易出错,或者可以由另一种或不同操作的车道保持辅助装置补充,以提高交通安全性。此外,对于自动驾驶操作,总是需要提供冗余驾驶功能的附加装置。
技术实现思路
1、因此,需要另外的车道保持辅助系统。
2、这些问题中的至少一些可以通过权利要求1所述的车道保持辅助装置或根据权利要求8所述的方法克服。从属权利要求是对独立权利要求的主体的进一步有利实现。
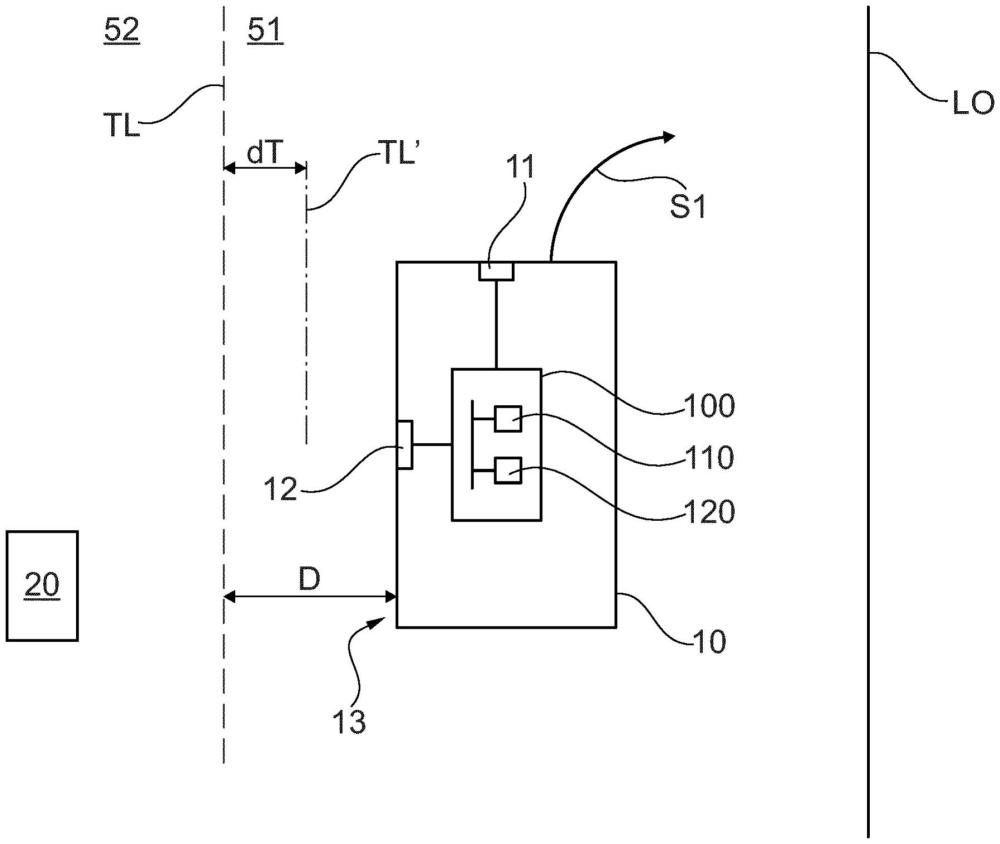
3、本发明涉及一种用于车辆的基于物体的车道保持辅助装置。该车辆包括第一传感器、第二传感器和车道保持功能。第一传感器被配置成能够确定车辆相对于车道的相对位置。第二传感器配置成能够检测相邻车道中的物体的位置。车道保持功能配置成能够使车辆保持在车道中的默认线附近。车道保持辅助装置包括控制单元,控制单元包括处理器和存储有指令的存储器,当这些指令在处理器上执行时,会导致以下情况:
4、-当车辆的一侧与触发线之间的距离小于指示车辆意外偏离车道的预定阈值时,触发转向干预;
5、-当达到车道保持功能的默认行驶线时,完成转向干预;以及
6、-当第二传感器检测到相邻车道中的物体时,移位触发线。
7、另外地或替代地,转向干预只能在达到触发线才激活和/或只要车辆尚未到达默认线时保持。预定阈值也可能为零,即当车辆侧面位于触发线处或触发线上时,实际上才会触发转向干预。到达默认线后,车道保持辅助装置可以关闭或进入睡眠模式,直到下一次,即车辆再次接近触发线时才需要激活。此外,车道保持辅助可以在车辆的两侧进行。
8、根据实施例,车道保持辅助装置可以利用车辆中已有的车道保持功能,通过考虑车辆周围的物体来进一步提高安全性。因此,车道保持辅助装置可以为现有的车道保持辅助系统提供补充功能。
9、本领域技术人员将把“相邻车道”的术语理解为并不是与整个车道相关,而只与这些车道中的可能造成潜在碰撞危险的物体所在的区域有关。例如,相邻车道可能只在车辆后方和前方延伸一定距离。此外,在合适的坐标系中,到物体的距离可以分为侧向距离和纵向距离,其中,术语“侧向距离”可以理解为车辆与物体之间垂直于车辆行驶方向测量的距离。同样,术语“纵向距离”可以理解为车辆与物体之间在车辆行驶方向上测量的距离。到物体的距离可以通过传感器、例如雷达或激光雷达装置等进行测量,因此可以分为纵向部分和侧向部分。
10、可选地,车道和相邻车道由车道标线分隔开,在这种情况下,触发线可能越出车道标线(从车辆上看时),因此可位于相邻车道内,特别是当在相邻车道中没有检测到物体时。因此,常规车道保持功能可以配置成在常规条件下将车辆保持在给定的车道内。因此,根据实施例的车道保持辅助装置不需要干预车道保持功能的正常运行。只有当车道偏离恰好是无意的,车道保持辅助装置才可能被激活。为此,第一传感器可以配置成测量与车道标记的(最近)距离。该最近的距离可以再次分为侧向距离和竖直距离(平行于重力测量)。
11、可选地,当到物体的距离小于阈值或随时间减小时,存储的指令被执行时可能导致将默认线向与物体背离的方向移位(例如朝向道路边界)。可选地,距离可以是侧向距离或实际距离,并且根据此限定可以相应地调整阈值。有利地,默认线的移位使得车辆保持在车道上。此外,默认线的移位可以通信至车道保持功能,这样它就不会干扰车道保持辅助装置。当到物体的距离再次大于阈值时,默认线可以被移动到其原始位置。同样,移动可以再次通信至车道保持功能(特别是当它作为单独的辅助装置在车辆中实现时)。
12、物体可能位于车辆的一侧(例如左侧),而另外的物体可能位于车辆的相反侧(例如右侧)。然后,可选地,存储的指令被执行时可能导致,在车辆一侧的物体与车辆的相反侧的另外的物体之间的中心区域(例如中间)移位默认线。术语“中间”可以相对于侧向限定,而不是在前部或后部。同样,默认线的移位可以再次通信至车道保持功能(特别是当它作为单独的辅助装置在车辆中实现时)。
13、可选地,触发线和/或默认线的移位的量可能与以下项中的至少一项相关:
14、-到物体的纵向距离,
15、-到物体的侧向距离,
16、-物体和车辆之间的相对速度,
17、-车辆的速度,
18、-确定物体与车辆碰撞可能性的其它动态或运动学参数(例如加速度、物体的先前行为、弯道或拐弯的频率),
19、-车道信息,例如车道宽度或弯道半径,
20、-物体的类型(例如汽车、摩托车、公共汽车、多功能车、自行车),
21、-路边的障碍物(例如树木、道路标记、防撞护栏、反光柱),
22、-来自相反方向的交通,
23、-交通密度。
24、交通密度可能决定了安全距离的增加,因此与低密度的交通情况相比,车道保持辅助装置可能会在早期阶段激活。有利地,触发线和/或默认线的移位可以基于上述参数动态地执行。它可以不断变化,以确保与车辆周围的所有物体保持足够的安全距离。
25、应该理解的是,实施例不依赖于对周围物体的分类,而是在评估整个交通状况时以动态连续的方式考虑所有存在的物体,并基于此对触发线或默认线进行调整。
26、又一实施例涉及车道保持系统,其包括车道保持功能和如前所述的车道保持辅助,其中,车道保持功能被配置成使车辆保持在车道中的默认线附近。又一个实施例涉及车辆,特别是多用途车辆(例如长途车辆),其具有这样的车道保持系统。根据另外的实施例,车道保持辅助装置也可以在乘用车或任何其它类型的车辆中实现。
27、另外的实施例涉及一种用于保持车辆车道的由计算机实现的方法。车辆也包括第一传感器、第二传感器和车道保持功能。第一传感器被配置成确定车辆相对于车道的相对位置。第二传感器配置成检测相邻车道中物体的位置。车道保持功能配置成使车辆保持在车道内。该方法包括:
28、-当车辆的一侧与触发线之间的距离小于指示车辆意外偏离车道的预定阈值时,触发转向干预;
29、-当达到车道保持功能的默认行驶线时,完成转向干预;以及
30、-当第二传感器检测到相邻车道中的物体时,移位触发线。
31、这种方法也可以在软件或计算机程序产品中实现。此外,只要达到预期的效果,步骤的顺序就可以不同。本发明的实施例尤其可以通过软件或作为软件模块在车辆的任何电子控制单元(ecu)中实现。因此,实施例还涉及具有程序代码的计算机程序,当该计算机程序在处理器上执行时用于执行该方法。另外的实施例涉及一种计算机可读存储装置,其包括程序代码,当程序代码在数据处理单元上执行时能够实施上述方法。
32、有利地,只有当物体靠近触发线时,才能激活车道保持辅助。因此,没有必要进行持续和永久的调整,这样就可以有利地避免许多不必要的变化。这反过来又提供了进一步的优势,即车道保持辅助装置也可以作为可用车道保持功能的备用系统,该车道保持功能可以更频繁地干扰,例如仅基于行车道标记和/或不管车辆周围的其它物体。
33、有利地,根据另外的实施例,默认线的移位可以受车辆不得离开特定车道的条件的约束。但这不是必需的。相反,如果交通安全允许,触发线可能在相邻车道内。这将减少相互影响的次数,特别是可以提高安全性,例如,如果对面车道上的物体靠近并代表碰撞风险。
34、因此,实施例提供一种车道保持辅助装置,在考虑车辆的周围物体(例如相邻车道中的其它车辆)的情况下,将车辆保持在给定的行驶车道内,以防存在意外偏离车道的风险。此外,在启动转向驱动时,也可以考虑车辆前方或后方的其它交通参与者。有利地,车道保持辅助装置对于车辆周围的所有物体提供了安全距离。
本文地址:https://www.jishuxx.com/zhuanli/20241014/317631.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。