用于监测机动车辆的车轮平衡的方法与流程
- 国知局
- 2024-08-02 17:04:13
[]本专利申请涉及一种用于监测机动车辆的车轮平衡的方法,该方法尤其应用于机动车辆的轮胎监测系统领域。
背景技术:
0、[背景技术]
1、出于安全目的,已知的做法是在机动车辆上配装被简称为tpms(轮胎压力监测系统)的监测系统。
2、这种监测系统通常包括一个中央处理单元、多个车轮单元(其中每个车轮单元都配备有车辆的一个相关联的车轮)和一个射频通信组件,该射频通信组件被设计为确保每个车轮单元与中央处理单元之间的通信。
3、中央单元包括电子计算机,简称为ecu(电子控制单元)。
4、每个车轮单元都包括传感器的电子组件,以便特别地检测车轮的异常情况。这些传感器可以例如是轮胎充气压力传感器、温度传感器和车轮加速度传感器。
5、另外,每个车轮单元还包括电池和存储器。
6、仍出于安全目的,还已知一种旨在基于车轮速度信号检测车轮松动的方法,比如文献ep3250424b1中所描述的方法。
7、现有技术、特别是文献ep3250424b1中所描述的方法无法检测到车轮不平衡,也就是说例如车轮虽然正确地固定在车辆上,但其重量围绕旋转轴分布不均匀。
8、此外,文献ep3250424b1中所描述的方法需要使用速度传感器来建立车轮速度信号。
技术实现思路
0、[技术实现要素:]
1、本发明的目的特别是通过提出一种用于基于由机动车辆的tpms系统的车轮单元的加速度计提供的数据来监测不平衡的方法来克服前述现有技术的缺点。
2、该目的以及通过阅读以下描述将变得显而易见的其他目的通过一种用于监测机动车辆的车轮平衡的方法来实现,所述机动车辆至少包括:
3、-第一车轮单元,该第一车轮单元安装在机动车辆的相关联的第一车轮上,并且包括第一计算机和第一加速度计,该第一车轮单元被设计为基于第一车轮的径向加速度值的多个第一样点来提供第一原始加速度信号,以及
4、-第二车轮单元,该第二车轮单元安装在机动车辆的相关联的第二车轮上,并且包括第二计算机和第二加速度计,该第二车轮单元被设计为基于第二车轮的径向加速度值的多个第二样点来提供第二原始加速度信号,
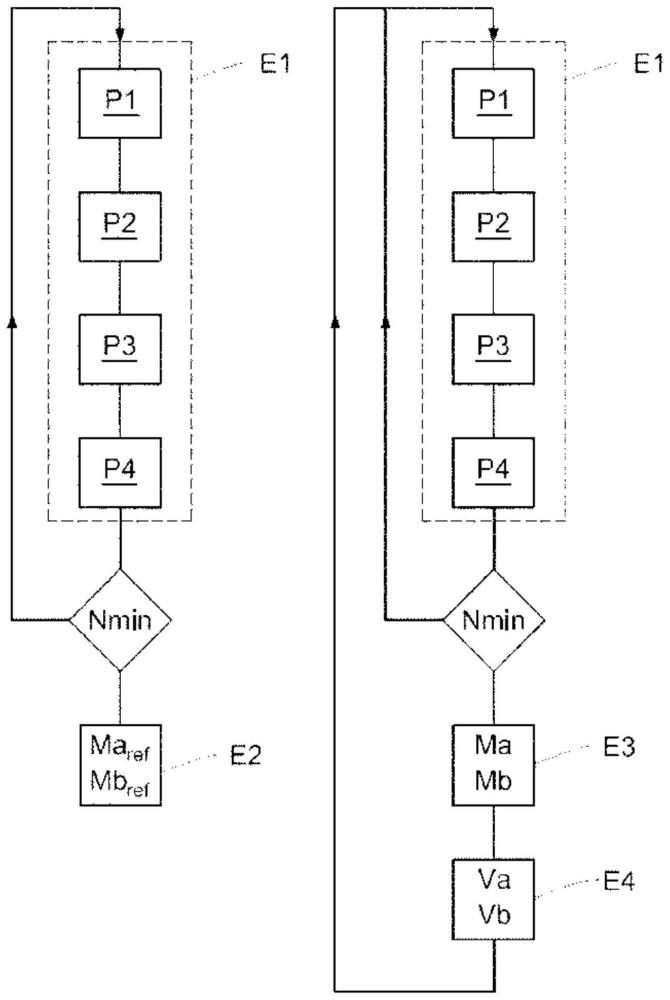
5、其特征在于,该方法至少包括:
6、-噪声测量步骤,该步骤至少包括:
7、*建模阶段,该建模阶段包括对第一车轮的第一正弦理论加速度信号和第二车轮的第二正弦理论加速度信号进行建模,
8、*噪声测量阶段,该噪声测量阶段包括:对于第一车轮,计算第一原始加速度信号的每个样点的值与第一理论加速度信号的对应理论值之差,然后针对计算出的差测量第一标准偏差,以及对于第二车轮,计算第二原始加速度信号的每个样点的值与第二理论加速度信号的对应理论值之差,然后针对计算出的差测量第二标准偏差,
9、-计算参考平均值的第一步骤,该第一步骤在重复噪声测量步骤之后进行,以便获得最小数量的第一标准偏差和第二标准偏差,并且包括计算所述第一标准偏差的第一参考平均值和所述第二标准偏差的第二参考平均值,
10、-计算当前平均值的第二步骤,该第二步骤在重复噪声测量步骤之后进行,以便获得最小数量的第一标准偏差和第二标准偏差,并且包括计算所述第一标准偏差的第一当前平均值和所述第二标准偏差的第二当前平均值;以及
11、-诊断步骤,该诊断步骤旨在计算第一当前平均值与第一参考平均值之间的第一变化量和第二当前平均值与第二参考平均值之间的第二变化量,并且旨在分析所述计算出的变化量,以便检测所述车轮可能的相对不平衡。
12、根据单独使用或组合使用的本发明的其他可选特征:
13、-在建模阶段期间,通过以下函数对所述车轮的每个理论加速度信号进行建模:
14、
15、其中,a是常数,该常数确定所讨论的车轮的理论加速度信号的幅值,ω是所讨论的车轮的测量角速度,使得:
16、ω=2*π*f,并且是所讨论的车轮的理论加速度信号的相位;
17、-噪声测量步骤包括调整阶段,该调整阶段包括:将第一理论加速度信号的相位调整为第一原始加速度信号的相位,以及将第二理论加速度信号的相位调整为第二原始加速度信号的相位,以便分别最小化第一标准偏差和第二标准偏差;
18、-噪声测量步骤包括传输阶段,在该传输阶段期间,第一标准偏差和第二标准偏差分别从第一车轮单元和第二车轮单元传输到装配在机动车辆上的中央处理单元;
19、-利用最小数量的第一标准偏差和第二标准偏差以及涵盖最后测量的标准偏差的滑动窗口来计算第一当前平均值和第二当前平均值;
20、-利用最小数量的第一标准偏差和第二标准偏差来计算第一参考平均值和第二参考平均值;
21、-在诊断步骤期间,如果满足以下条件,则将所述第一标准偏差的第一参考平均值和所述第二标准偏差的第二参考平均值各自重置,并再次执行计算这些参考平均值的第一步骤:
22、-涉及第一车轮的第一变化量大于上限阈值,以及
23、-涉及第二车轮的第二变化量大于上限阈值;
24、-在诊断步骤期间,如果涉及第一车轮的第一变化量或涉及第二车轮的第二变化量之一大于上限阈值,并且如果该第一变化量或该第二变化量之一低于下限阈值,则输出用信号发送的车轮不平衡已超过所述上限阈值的警告;
25、-该上限变化量阈值等于百分之十,并且该下限变化量阈值等于百年分之五;
26、-第一车轮和第二车轮属于机动车辆的同一车桥。
27、本发明还涉及一种机动车辆,该机动车辆至少包括:
28、-第一车轮单元,该第一车轮单元安装在车辆的相关联的第一车轮上,并且包括第一计算机和第一加速度计,该第一车轮单元被设计为提供第一原始加速度信号,该第一原始加速度信号包括第一车轮的加速度值的多个第一样点,
29、-第二车轮单元,该第二车轮单元安装在车辆的相关联的第二车轮上,并且包括第二计算机和第二加速度计,该第二车轮单元被设计为提供第二原始加速度信号,该第二原始加速度信号包括第二车轮的加速度值的多个第二样点,以及
30、-中央单元,
31、其特征在于,所述中央单元和/或所述车轮单元被适当地编程以实施上面所描述的方法。
技术特征:1.一种用于监测机动车辆(10)的车轮(16a,16b,16c,16d)平衡的方法,所述机动车辆(10)至少包括:
2.如权利要求1所述的用于监测车轮平衡的方法,其特征在于,在建模阶段(p1)期间,通过以下函数对所述车轮(16a,16b)的每个理论加速度信号(sath(t),sbth(t))进行建模:
3.如前述权利要求中任一项所述的用于监测车轮平衡的方法,其特征在于,该噪声测量步骤(e1)包括调整阶段(p3),该调整阶段包括:将该第一理论加速度信号(sath(t))的相位调整为该第一原始加速度信号(sa(t))的相位,以及将该第二理论加速度信号(sbth(t))的相位调整为该第二原始加速度信号(sb(t))的相位,以便分别最小化这些第一标准偏差和这些第二标准偏差。
4.如前述权利要求中任一项所述的用于监测车轮平衡的方法,其特征在于,该噪声测量步骤(e1)包括传输阶段(p4),在该传输阶段期间,该第一标准偏差和该第二标准偏差分别从该第一车轮单元(14a)和该第二车轮单元(14b)传输到装配在该机动车辆(10)上的中央处理单元(12)。
5.如前述权利要求中任一项所述的用于监测车轮平衡的方法,其特征在于,利用最小数量(nmin)的第一标准偏差和第二标准偏差以及涵盖最后测量的标准偏差的滑动窗口来计算该第一当前平均值(ma)和该第二当前平均值(mb)。
6.如前述权利要求中任一项所述的用于监测车轮平衡的方法,其特征在于,利用最小数量(nmin)的第一标准偏差和第二标准偏差来计算该第一参考平均值(maref)和该第二参考平均值(mbref)。
7.如前述权利要求中任一项所述的用于监测车轮平衡的方法,其特征在于,在该诊断步骤(e4)期间,如果满足以下条件,则将所述第一标准偏差的第一参考平均值(maref)和所述第二标准偏差的第二参考平均值(mbref)各自重置,并再次执行计算这些参考平均值的第一步骤(e2):
8.如前述权利要求中任一项所述的用于监测车轮平衡的方法,其特征在于,在该诊断步骤(e4)期间,如果涉及该第一车轮(16a)的第一变化量(va)或涉及该第二车轮(16b)的第二变化量(vb)之一大于上限阈值,并且如果该第一变化量(va)或该第二变化量(vb)之一低于下限阈值,则输出用信号发送的该车轮(16a,16b)不平衡已超过所述上限阈值的警告。
9.如权利要求8所述的用于监测车轮平衡的方法,其特征在于,该上限变化量阈值等于百分之十,并且该下限变化量阈值等于百分之五。
10.如前述权利要求中任一项所述的用于监测车轮平衡的方法,其特征在于,该第一车轮(16a)和该第二车轮(16b)属于该机动车辆(10)的同一车桥。
11.一种机动车辆(10),该机动车辆至少包括:
技术总结本发明涉及一种用于监测机动车辆的车轮平衡的方法,其特征在于,该方法至少包括:对第一车轮的第一正弦理论加速度信号和第二车轮的第二正弦理论加速度信号进行建模的阶段;噪声测量阶段,该噪声测量阶段包括对于第一车轮,计算第一原始加速度信号的每个样点的值与第一理论加速度信号的对应理论值之差,然后针对计算出的差测量第一标准偏差,以及对于第二车轮,计算第二原始加速度信号的每个样点的值与该第二理论加速度信号的对应理论值之差,然后针对计算出的差测量第二标准偏差;计算参考平均值的第一步骤,该第一步骤包括计算所述第一标准偏差的第一参考平均值和所述第二标准偏差的第二参考平均值;计算所述第一标准偏差的第一当前平均值和所述第二标准偏差的第二当前平均值的第二步骤;以及诊断步骤,该诊断步骤旨在计算第一当前平均值与第一参考平均值之间的第一变化量和第二当前平均值与第二参考平均值之间的第二变化量,以便检测所述车轮可能的相对不平衡。技术研发人员:F·德莱普兰克,X·罗兰德,N·吉纳特受保护的技术使用者:大陆汽车科技有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240718/253868.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表