增程器控制方法、装置、车载终端和存储介质与流程
- 国知局
- 2024-08-02 17:03:17
本技术涉及车辆控制领域,特别是涉及一种增程器控制方法、装置、车载终端和存储介质。
背景技术:
1、电动汽车(battery electric vehicle,bev)是指以车载电源为动力,用电机驱动车轮行驶,符合道路交通、安全法规等各项要求的车辆。由于当前电池技术水平发展有限,电动汽车的续航里程受到了一定的限制。增程式电动汽车(extended range electricvehicle,erev)通过在传统ev上配置增程器,有效延长了ev的续航里程。
2、在增程式电动汽车行驶过程中,通常先工作在纯电动模式下,然后再采用发动机开关或功率跟随等方式,通过增程器对电池进行补电控制。然而,传统的增程器控制方式相对机械,无法实现多驾驶模式下的按需控制,导致增程器的控制过程其灵活性和准确性较差。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高增程器控制的灵活性和准确性的增程器控制方法、装置、车载终端和存储介质。
2、第一方面,本技术提供了增程器控制方法,其特征在于,包括:
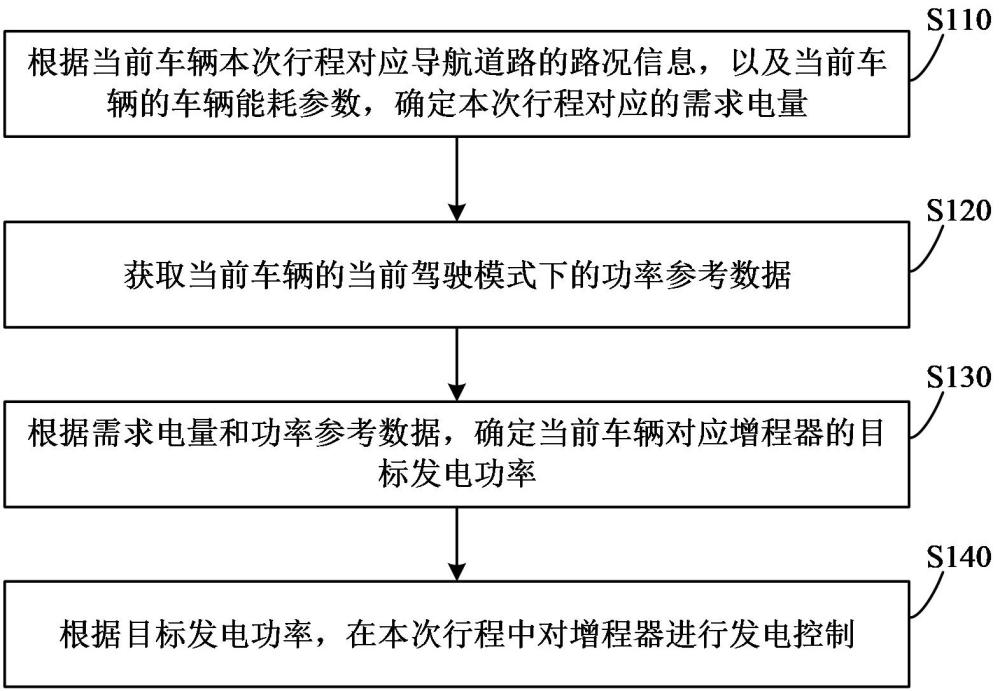
3、根据当前车辆本次行程对应导航道路的路况信息,以及所述当前车辆的车辆能耗参数,确定本次行程对应的需求电量;
4、获取所述当前车辆的当前驾驶模式下的功率参考数据;
5、根据所述需求电量和所述功率参考数据,确定所述当前车辆对应增程器的目标发电功率;
6、根据所述目标发电功率,在本次行程中对所述增程器进行发电控制。
7、在其中一个实施例中,若所述当前驾驶模式为低噪声模式,则所述功率参考数据为不同测量车速、不同发电功率与噪声强度之间的第一对应关系;相应的,所述根据所述需求电量和所述功率参考数据,确定所述当前车辆对应增程器的目标发电功率,包括:根据所述第一对应关系,从所述当前车辆的当前车速对应的发电功率中,选取发电电量满足所述需求电量的目标发电功率。
8、在其中一个实施例中,所述第一对应关系采用以下方式构建得到:获取参考车辆在不同测量车速和不同发电功率下的噪声强度;其中,所述参考车辆的车辆类型与所述当前车辆的车辆类型相同;将低于所述参考车辆对应噪声强度上限的噪声强度,与相应测量车速和发电功率之间,构建所述第一对应关系。
9、在其中一个实施例中,所述参考车辆对应噪声强度上限,采用以下方式确定:基于噪声边界函数,根据所述当前车速,确定所述噪声强度上限;其中,所述噪声边界函数采用以下方式生成:获取所述参考车辆在纯电行驶的情况下,在不同参考车速下不同座舱位置对应的参考噪声强度;根据所述参考车辆的车辆类型,确定不同座舱位置对应的噪声权重;根据不同座舱位置对应的参考噪声强度和相应噪声权重,确定相应参考车速下所述参考车辆的噪声边界;基于不同参考车速和相应噪声边界,构建所述噪声边界函数。
10、在其中一个实施例中,若所述当前驾驶模式为低油耗模式,则所述功率参考数据为不同扭矩区间、不同转速区间与区间内最低比油耗率之间的第二对应关系;相应的,所述根据所述需求电量和所述功率参考数据,确定所述当前车辆对应增程器的目标发电功率,包括:获取所述需求电量对应的需求功率;根据每一转速区间在不同扭矩区间下对应最低比油耗率,确定相应转速区间下的发电功率;根据所述需求功率从各所述发电功率中,选取所述当前车辆对应增程器的目标发电功率。
11、在其中一个实施例中,若所述当前驾驶模式为电池充电状态soc模式,则所述功率参考数据为不同soc差异下各参考车速与发电功率之间的第三对应关系;相应的,所述根据所述需求电量和所述功率参考数据,确定所述当前车辆对应增程器的目标发电功率,包括:根据所述当前车辆的当前soc与所述导航道路中不同导航路段下的用电模式对应的目标soc之间的差值,确定目标soc差异;根据第三对应关系和所述目标soc差异,确定相应导航路段下的发电功率;根据所述当前车辆的当前车速与预设发电车速之间的大小关系,以及发电功率,确定本次行程对应的预期发电量;在所述预期发电量满足所述需求电量的情况下,将各导航路段下的发电功率,作为所述目标发电功率。
12、在其中一个实施例中,所述根据第三对应关系和所述目标soc差异,确定相应导航路段下的发电功率,包括:根据第三对应关系中的第一子关系,确定所述目标soc差异对应的目标发电等级;其中,所述第一子关系为不同soc差异与发电等级之间的对应关系;根据第三对应关系中的第二子关系,确定目标发电等级下,所述当前车辆按照当前车速在相应导航路段下行驶的发电功率;其中,第二子关系为不同发电等级下不同车速与发电功率之间的对应关系。
13、第二方面,本技术还提供了一种增程器控制装置,包括:
14、第一确定模块,用于根据当前车辆本次行程对应导航道路的路况信息,以及所述当前车辆的车辆能耗参数,确定本次行程对应的需求电量;
15、获取模块,用于获取所述当前车辆的当前驾驶模式下的功率参考数据;
16、第二确定模块,用于根据所述需求电量和所述功率参考数据,确定所述当前车辆对应增程器的目标发电功率;
17、控制模块,用于根据所述目标发电功率,在本次行程中对所述增程器进行发电控制。
18、第三方面,本技术还提供了一种车载终端,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
19、根据当前车辆本次行程对应导航道路的路况信息,以及所述当前车辆的车辆能耗参数,确定本次行程对应的需求电量;
20、获取所述当前车辆的当前驾驶模式下的功率参考数据;
21、根据所述需求电量和所述功率参考数据,确定所述当前车辆对应增程器的目标发电功率;
22、根据所述目标发电功率,在本次行程中对所述增程器进行发电控制。
23、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
24、根据当前车辆本次行程对应导航道路的路况信息,以及所述当前车辆的车辆能耗参数,确定本次行程对应的需求电量;
25、获取所述当前车辆的当前驾驶模式下的功率参考数据;
26、根据所述需求电量和所述功率参考数据,确定所述当前车辆对应增程器的目标发电功率;
27、根据所述目标发电功率,在本次行程中对所述增程器进行发电控制。
28、上述增程器控制方法、装置、车载终端和存储介质,通过引入当前车辆的当前驾驶模式,并根据当前驾驶模式下的功率参考数据,确定增程器的目标发电功率,使得目标发电功率确定过程中,能够充分考量当前驾驶模式的影响,提高了目标发电功率与当前驾驶模式的契合性,从而提高了目标发电功率的准确性,进而提高了本次行程中对增程器进行发电控制的合理性和准确性。另外,在车辆行驶过程中,通过引入当前驾驶模式对增程器的目标发电功率进行差异化确定,进而实现了对增程器的差异化控制,从而提高了增程器控制的灵活性和模式匹配性。
本文地址:https://www.jishuxx.com/zhuanli/20240718/253740.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表