基于非线性弹簧模型的双轮足式机器人跳跃控制方法
- 国知局
- 2024-08-01 07:35:58
本发明涉及基于非线性弹簧模型的双轮足式机器人跳跃控制方法,属于轮足机器人跳跃控制。
背景技术:
1、双轮足式机器人兼具轮式的高速高效性和足式的地面适应性,可以快速灵活地在地面上移动,当面对非结构化地形时,则主要通过跳跃的方式越障。因此,跳跃能力成为了衡量机器人环境适应能力的重要指标之一。
2、目前对双轮足式机器人的跳跃控制研究还相对较少,主要采用基于双质量块线性弹簧的虚拟模型规划跳跃轨迹进而实现跳跃控制。但是这种控制模型对于关节输出力矩的要求很高,限制了机器人的实验验证,导致目前大部分跳跃研究都止步于仿真层面。也有研究者采用功率密度更高的液压驱动方式实现了跳跃,这同样对关节输出能力要求很高。
3、因此,针对上述问题,提供一种新的虚拟模型来规划跳跃轨迹,降低跳跃对关节输出力矩的需求以及提升跳跃高度,对提高双轮足式机器人的环境适应能力具有非常重大的意义。
技术实现思路
1、针对现有双轮足式机器人的跳跃控制对关节输出力矩的要求高的问题,本发明提供一种基于非线性弹簧模型的双轮足式机器人跳跃控制方法。
2、本发明的一种基于非线性弹簧模型的双轮足式机器人跳跃控制方法,
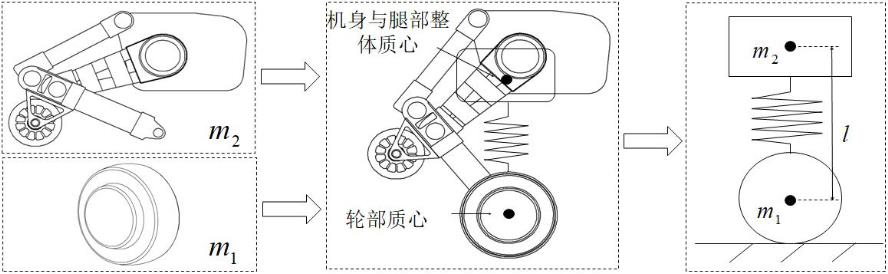
3、以双轮足式机器人的两个轮毂电机为下质量块,机身与腿部连杆作为上质量块,两个质量块之间通过非线性弹簧连接,建立双质量块非线性弹簧模型;
4、将跳跃控制分为起跳相、上升相、下降相和缓冲相四个阶段,均采用qp二次规划的方法进行轨迹规划:
5、起跳相轨迹规划:基于双质量块非线性弹簧模型,在起跳相结束时刻使上质量块速度与上质量块目标速度的误差最小;同时在起跳相全过程中使目标弹簧力不大于最大弹簧力与支持力系数的乘积,通过最小化支持力系数使对应的关节力矩最小,在起跳相全过程中使非线性弹簧的弹簧长度不超过弹簧最大长度与弹簧长度系数的乘积,以及在起跳相结束时刻使目标弹簧力抵消下质量块重力;
6、上升相轨迹规划:采用三次插值法规划上质量块和下质量块的加速度,并采用二次规划的方法在上升相结束时刻使下质量块高度与下质量块目标高度的误差最小,使关节力矩最小;同时在上升相全过程中使目标弹簧力不大于最大弹簧力与支持力系数的乘积和使非线性弹簧的弹簧长度始终不超过弹簧最大长度,以及在上升相结束时刻使下质量块的速度归零;
7、下降相轨迹规划:使上质量块与下质量块之间的距离保持不变,以使关节角度保持不变,为着陆做准备;
8、缓冲相轨迹规划:基于双质量块非线性弹簧模型,在缓冲相结束时刻使上质量块高度与目标弹簧长度的误差最小,使关节力矩最小;同时在缓冲相全过程中使目标弹簧力不大于最大弹簧力与支持力系数的乘积和使非线性弹簧的弹簧长度始终不超过弹簧最大长度,以及在缓冲相结束时刻使上质量块的速度归零;
9、在轨迹规划过程中,首先将跳跃高度分为起跳高度和收腿高度,根据腿部伸展范围确定起跳高度的上限和下限,选择起跳高度的上限、下限和中间值规划完整跳跃轨迹;再以起跳高度为变量基于二分法对完整跳跃轨迹进行迭代优化,确定最优起跳高度和最优跳跃轨迹;在规划完整跳跃轨迹的过程中,以弹簧劲度系数、弹簧原长,各阶段开始和结束时刻的弹簧长度作为规划参数,基于qp二次规划进行各阶段跳跃轨迹的规划;最终得到完整跳跃轨迹下目标弹簧长度和目标弹簧力关于时间的曲线,作为最优轨迹规划结果;
10、最后,基于双轮足式机器人的运动学和腿部静力学表达式,建立双轮足式机器人关节空间与双质量块非线性弹簧模型的映射关系,利用映射关系将目标弹簧力映射为目标关节力矩;再以目标关节力矩为前馈输入,通过关节角度的控制使上质量块和下质量块的高度差为目标弹簧长度,实现跳跃控制。
11、根据本发明的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,所述双轮足式机器人为单自由度腿部的双轮足式机器人。
12、根据本发明的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,双质量块非线性弹簧模型为:
13、,
14、式中为上质量块质量,为上质量块高度,为时间,为非线性弹簧三次项劲度系数,为非线性弹簧原长,为非线性弹簧一次项劲度系数,为重力加速度,表示对求二阶导数。
15、根据本发明的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,起跳相轨迹规划的具体实现方法为:
16、,
17、式中为起跳相起始时刻,为起跳相结束时刻,为上质量块目标速度,为支持力系数,为目标弹簧力,为最大弹簧力,为非线性弹簧的目标弹簧长度,为弹簧长度系数,为弹簧最大长度,为下质量块质量,min表示取最小值,表示约束,表示对求一阶导数。
18、根据本发明的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,上升相轨迹规划中采用三次插值法规划上质量块和下质量块的加速度的方法为:
19、,
20、式中为下质量块高度,为自定义三次项时间系数,为自定义二次项时间系数,为自定义一次项时间系数,为自定义常数项,表示对求二阶导数。
21、根据本发明的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,上升相轨迹规划中二次规划的具体实现方法为:
22、,
23、式中为上升相结束时刻,为下质量块目标高度,表示对求一阶导数。
24、根据本发明的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,缓冲相轨迹规划的具体实现方法为:
25、,
26、式中为下降相结束时刻,为缓冲相结束时刻。
27、根据本发明的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,双轮足式机器人关节空间与双质量块非线性弹簧模型的映射关系为:
28、,
29、式中为关节力矩,为弹簧力,为映射函数。
30、本发明的有益效果:本发明方法以非线性弹簧为基础建立虚拟模型,进行跳跃轨迹规划。可使机器人跳跃过程中以最小关节力矩实现更大的跳跃高度。
31、以现有的单自由度腿部的双轮足式机器人为例,经实验验证产生的效果如下:
32、1、在机器人不收腿的情况下(即只规划起跳相的轨迹,之后腿部保持不动),基于线性弹簧模型的跳跃轨迹可以达到最大跳跃高度为0.027m,而基于本发明非线性弹簧模型的跳跃轨迹可以达到的最大跳跃高度为0.093m,跳跃高度提升至了3.44倍;
33、2、本发明基于二分法和qp二次规划对跳跃轨迹进行迭代优化得到的完整跳跃轨迹,可以使机器人的跳跃高度从0.093m提升至0.115m,跳跃高度提升了21.5%。相同跳跃高度下,关节所需的最大力矩降低了14%;
34、3、本发明基于腿部静力学和整体运动学建立的虚拟模型与关节空间的映射方法,使机器人的跳跃具有较好的稳定性和可重复性。
技术特征:1.一种基于非线性弹簧模型的双轮足式机器人跳跃控制方法,其特征在于,
2.根据权利要求1所述的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,其特征在于,所述双轮足式机器人为单自由度腿部的双轮足式机器人。
3.根据权利要求2所述的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,其特征在于,双质量块非线性弹簧模型为:
4.根据权利要求3所述的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,其特征在于,起跳相轨迹规划的具体实现方法为:
5.根据权利要求4所述的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,其特征在于,上升相轨迹规划中采用三次插值法规划上质量块和下质量块的加速度的方法为:
6.根据权利要求5所述的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,其特征在于,上升相轨迹规划中二次规划的具体实现方法为:
7.根据权利要求6所述的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,其特征在于,缓冲相轨迹规划的具体实现方法为:
8.根据权利要求7所述的基于非线性弹簧模型的双轮足式机器人跳跃控制方法,其特征在于,双轮足式机器人关节空间与双质量块非线性弹簧模型的映射关系为:
技术总结一种基于非线性弹簧模型的双轮足式机器人跳跃控制方法,属于轮足机器人跳跃控制技术领域。本发明针对现有双轮足式机器人的跳跃控制对关节输出力矩的要求高的问题。包括建立双质量块非线性弹簧模型;将跳跃控制分为起跳相、上升相、下降相和缓冲相四个阶段,各阶段均采用QP二次规划的方法进行轨迹规划;以弹簧劲度系数、弹簧原长,各阶段开始和结束时刻的弹簧长度作为规划参数,获得目标弹簧长度和目标弹簧力关于时间的曲线;再将跳跃高度分为起跳高度和收腿高度,以起跳高度为变量基于二分法进行跳跃轨迹的迭代优化,获得最优跳跃轨迹。本发明用于实现双轮足式机器人跳跃控制。技术研发人员:金弘哲,高靖松,高良,朱延河,赵杰受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/228111.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表